-
Математическая морфология.
Электронный
математический и медико-биологический журнал. - Т. 6. -
Вып. 3. -
2007. - URL:
http://www.smolensk.ru/user/sgma/MMORPH/TITL.HTM
http://www.smolensk.ru/user/sgma/MMORPH/N-15-html/TITL-15.htm
http://www.smolensk.ru/user/sgma/MMORPH/N-15-html/cont.htm
УДК 611(081)
Позвоночный столб человека - система составных рычагов
Ó 2007 г. Нечаев
В. И., Малащенкова Е. В.
Каждый позвонок, это один составной рычаг равновесия, одно
кинематическое звено, входит в состав четырех кинематических пар, образующих четыре
закрытые кинематические цепи. Форма позвоночного столба, это согнутая пологая
сегментированная пространственная спираль с правым или левым направлением
полувитков в зависимости от стороны опорной
конечности. Основная часть совокупных сил механической энергии воспринимается и
компенсируется волокнистыми элементами межпозвоночных непрерывных соединений за
счет их растяжения. На позвоночный столб не распространяется действие закона
сохранения механической энергии и его нельзя рассматривать как простой
механический рычаг. Формула M=F x d не может
использоваться для расчета силовых нагрузок в позвоночнике.
Поводом
для настоящего сообщения служат многочисленные публикации в отечественной и
зарубежной литературе, в том числе и в руководствах для врачей и
студентов, о том, что при вытянутых
горизонтально вперед руках, при подъёме и удержании груза на вытянутых вперёд руках, позвоночник проявляет функцию
рычага 1 рода, рычага равновесия. Согласно этой точке зрения длинное плечо
этого рычага, плечо нагрузки, простирается от точки опоры –
пояснично-крестцового диска вверх и включает в себя подвижный отдел
позвоночника, плечевой пояс, свободные верхние конечности. Короткое плечо, плечо
силы, расположено сзади позвоночника,
является постоянным по длине и равно толщине слоя мышц – разгибателей
спины. При этом, если длина плеча силы принимается за единицу, то длина плеча
нагрузки в зависимости от положения
верхних конечностей доходит до
15. Отмечают, что наличие груза соответственно
увеличивает силу давления на точку
опоры – межпозвоночный
пояснично-крестцовый диск (LV – SI), где действуют нагрузки сжатия.
Моментом
силы рычага (М) относительно оси вращения рычага является физическая величина, равная произведению силы (F) на длину плеча рычага (d): M = F x d. Расчет сил механической энергии,
действующих по закону рычага на пояснично-крестцовый диск при наклоне тела и
при удержании на вытянутых вперед руках груза, показывает нагрузки во многие
сотни килограмм (F.
Bradford,
R.
Spurling
1945; S.
Mathiash
1956; A.
Nachemson
1976). С этими большими нагрузками и связывают широкое распространение
патологии позвоночника, преимущественную локализацию патологии в области позвоночных
двигательных сегментов SI
– LIV
и считают, что таким образом современный человек «расплачивается» за свое прямохождение.
Рассмотрим
эту точку зрения с позиции эволюции, анатомии и биомеханики. Позвоночный столб
человека сформировался в результате
длительной эволюции опорно-двигательной системы наземных позвоночных в условиях постоянного действия сил гравитации
под влиянием совершенствования локомоции и мышечных функций. Эволюционный
процесс всегда имеет только прогрессивное направление: развиваются и
сохраняются те структуры опорно-двигательного аппарата, которые успешно
противостояли и противостоят влиянию гравитационных нагрузок и совершенствуют
локомоторные функции. Прогрессивная эволюция не может сформировать и сохранить
структуры, в которых действующие
внутренние силы механической энергии, увеличивая свою величину, приводят эти
опорно-двигательные структуры к
патологическим изменениям без достижения позитивного функционального эффекта.
Поэтому постулат, что позвоночный столб, это – рычаг с точкой опоры на
межпозвоночный диск SI
– LV
и результатом этого является широкое распространение патологии позвоночного
столба, является изначально неверным, противоречащим основному принципу
эволюционного процесса - принципу позитивности процесса эволюции.
В
классической механике, в
биомеханике, в анатомии рычаг -
это любое твердое тело, которое имеет опору и может поворачиваться
вокруг оси вращения. Кость скелета,
имеющая одну суставную поверхность, это – твердое тело, жесткий стержень одного рычага, одно кинематическое
звено. Кость, имеющая две суставные поверхности – это также одно кинематическое
звено, но два так называемых составных рычага, входящие в состав двух кинематических пар. Составные
рычаги обеспечивают составные движения, когда движение одного рычага (звена)
обуславливает несущие и несомые движения ряда других звеньев цепи. Каждый
простой сустав, имеющий две суставные поверхности, является кинематической
парой, подвижным соединением двух
звеньев. Сложные, комплексные и комбинированные суставы, объединяющие
функционально и/или структурно более двух суставных поверхностей, образуют
кинематические узлы.
Функционально
и структурно связанные системы звеньев
(рычагов, костей) и кинематических пар (суставов) образуют кинематические цепи (механизмы). Кинематические цепи
(механизмы, составные рычаги) обеспечивают
передачу и преобразование механических движений и сил механической энергии.
Кинематическая
цепь, которая заканчивается свободным звеном,
является открытой. Если последнее звено кинематической цепи замыкается
на первое звено этой или другой цепи непосредственно или через другое
тело, то такая цепь является замкнутой.
Известно
правило, применимое к рычагу и ко всем простым механизмам: во сколько раз
механизм дает выигрыш в силе, во столько же раз получается проигрыш в
расстоянии («золотое правило» механики). Входящие в биокинематические цепи кости
скелета человека, образуют системы составных рычагов, состоящие из несущих и
несомых рычагов, в которых «золотое правило» механики проявляется иначе и
намного сложнее, чем в простых одиночных рычагах.
Проследим
пути распространения сил механической энергии от верхних конечностей к
позвоночному столбу.
При
подъёме груза силы механической энергии передаются через рычаговую систему
свободной верхней конечности, затем пояса верхней конечности (плечевая кость –
лопатка, лопатка – ключица, ключица-грудина). Далее следует кинематическая цепь - грудина - истинные и
ложные рёбра, рёбра – позвонки (ThI-X). Затем силы механической энергии перемещаются
через позвоночные двигательные сегменты ThX – SI, крестец, крестцово-подвздошные и
тазовые сочленения.
Значительная часть сил механической энергии передаётся от костей верхней конечности на позвоночный столб через трапециевидные, ромбовидные, лестничные, широчайшие, поднимающие лопатку и др. мышцы. Три мощные мышцы: широчайшая, выпрямитель туловища, большая ягодичная, имеют поверхности фиксации, которые переходят с подвижного отдела позвоночника на крестец и на тазовую кость. Площади фиксации этих мышц перекрывают друг друга, участвуя, совместно с мощным связочным аппаратом, в фиксации, укреплении пояснично - крестцового соединения и передаче сил механической энергии. Часть сил механической энергии поглощается при сокращении мышц живота, таза и диафрагмы, что повышает внутрибрюшное давление и способствует фиксации позвоночного столба. Часть сил механической энергии поглощаются мышцами шеи и грудной клетки.
Скелет
верхних конечностей не имеет непосредственного контакта с позвоночным столбом. Нет ни одной кости,
которая бы соединяла скелет пояса верхних конечностей с позвоночником. Кисти и позвоночник связывают многорычаговые
(многозвенные) составные системы (кинематические цепи) и непрерывные соединения
(синартрозы) в виде связок, мышц, фасций, сухожилий, апоневрозов.
При
сгибании туловища (наклонах туловища вперёд) под различными углами происходят несущественные изменения углов
между SI
– LV.
Сгибание туловища (наклон вперед) и уменьшение угла между туловищем в
целом и свободными нижними конечностями
происходит преимущественно за счет сгибания в тазобедренных суставах и
некоторого уменьшение кривизны поясничного лордоза. Масса туловища и удерживаемого
груза действует сверху через заднее плечо рычага равновесия, каким является таз
в целом. Работу по удержанию массы туловища и груза на вытянутых руках и
удержанию равновесия выполняют мышцы свободных верхних конечностей, пояса
верхних конечностей спины, живота, а также мышцы передней и задней групп пояса
нижней конечности и часть мышц бедра.
Мышцы передней и задней групп пояса нижней конечности начинаются на костях
таза, проходят медиально и латерально от метафиза бедренной кости и
прикрепляются в области большого и
малого вертелов бедра. Эти мышцы, вызывая
ротации бедра, таза и подвижного отдела позвоночного столба, растягивают
межпозвоночные синдесмозы и придают сегментированному позвоночному столбу необходимую
жесткость (В.И.Нечаев,2005; В.И.Нечаев, Е.В.Малащенкова, 2006).
Рассмотрим механизм этой функции.
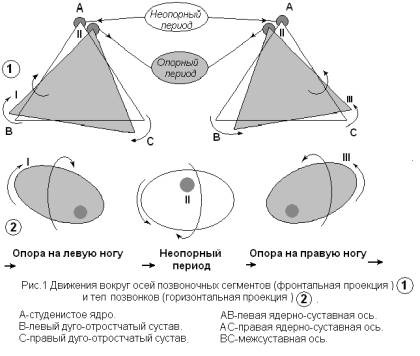
Смежные позвонки контактируют между собой тремя
ограниченно подвижными опорными точками: парными дуго-отростчатыми суставами и
в норме легко смещаемым студенистым ядром. Студенистые ядра при нагрузках,
действующих по вертикали вдоль позвоночного столба, меняют вертикальную
траекторию действия сил механической
энергии на траекторию радиальную в горизонтальной плоскости (Francechini M., 1960). Студенистые ядра являются центрами, вокруг
которых происходят смещения позвонков (J. Calve, M. Galland,1930).
Оси (парные ядерно-суставные и непарная
межсуставная ось), вокруг и
вдоль которых происходят все смещения позвонков, проходят через эти точки опоры
(Рис. 1). Векторы ядерно-суставных осей соответствуют направлениям мышечных волокон
поперечно-остистых мышц, направлениям волокон межпозвоночных синдесмозов,
направлениям волокон мышц стенок
живота, траекториям локомоторных смещений таза под влиянием локомоторных
смещений головок бедренных костей (Юдельсон Я. Б., Нечаев В. И., 2000; Нечаев
В. И., 2005).
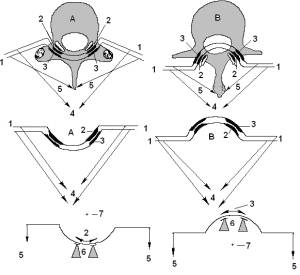
Рис.2 Схемы рычагов равновесия грудных (А) и поясничных (В) позвонков (проекция
на горизонтальную плоскость).
1 – поперечные отростки нижележащих позвонков.
2 – верхние суставные отростки нижележащих позвонков.
3 – нижние суставные отростки вышележащих позвонков.
4 – остистые отростки.
5 – поперечно-остистые мышцы.
6 – верхние суставные отростки нижележащих позвонков, точки опоры и направляющие для верхнего позвонка.
7 – ось вращения позвонка.
Каждый позвонок в составе двигательного позвоночного
сегмента является рычагом равновесия (1 рода). Стержнем рычага, монолитной пространственной
структурой, является сам костный позвонок в целом. Точками приложения сил
являются поперечные и остистые отростки,
точками опоры – дуго-отростчатые суставы и их связочный аппарат (Рис.2).
Когда мы показываем
вращение позвонка в горизонтальной плоскости, то всегда имеем в виду, что
вращение позвонка, это только составная часть его торсионных смещений. Другие
составные части торсии, это - движения
позвонка в сагиттальной и фронтальной плоскостях.
Кинематические цепи
позвоночного столба, связанные с нижними конечностями, функционируют синхронно
и параллельно. Кинематическая система позвоночного столба от каждой нижней конечности состоит из двух параллельных
кинематических цепей, состоящих из правых и левых дуго-отростчатых суставов (кинематических
пар). Всего в позвоночном столбе имеется четыре кинематических цепи с параллельными кинематическими связями.
Являясь механизмом с параллельными кинематическими связями, позвоночник
обладает повышенной жесткостью системы.
Каждый поясничный позвонок, как структурная единица,
представляет собой одно кинематическое звено, т. е. один составной двуплечий
рычаг. Посредством суставных поверхностей на парных верхних и нижних суставных
отростках один поясничный позвонок
входит в состав четырех кинематических пар (дуго-отростчатых суставов).
Функциональная единица позвоночника, позвоночный
двигательный сегмент, состоит из двух смежных позвонков и межпозвоночного
диска. Это – два кинематических звена, два двуплечих составных рычага. Правый и
левый дуго-отростчатые суставы сегмента образуют две кинематические пары.
Суставные поверхности парных верхних и нижних суставных отростков входят в
состав четырех кинематических пар, принадлежащих верхнему и нижнему смежным
сегментам. Дуго-отростчатые суставы и парные, верхние и нижние суставные
отростки, образуют и входят в состав четырех закрытых локомоторных кинематических
цепей: по две цепи с параллельными кинематическими связями от правой и левой
нижних конечностей.
Форма позвоночного столба - согнутая пологая сегментированная
пространственная спираль с правым или левым направлением витков в зависимости
от стороны опорной конечности. В условиях нормы направление витков позвоночной спирали меняется и при ходьбе, и
в положении стоя, и в положении лежа
при перемене позы. Положение стоя не является статическим для позвоночника. В
положении стоя нагрузка всегда в той
или иной степени переносится с одной конечности на другую. Это, в свою очередь,
вызывает переменные силовые влияния на позвоночный столб. Легкость и быстрота
перемены направления витков позвоночной
спирали обеспечивается строением межпозвоночных соединений, а так же
тем, что поясничный и грудной отделы позвоночника вместе образуют один полный
виток спирали. Поясничный отдел позвоночника и DXIII-XI при этом образуют нижний (поясничный)
полувиток спирали, а грудные позвонки
выше DXI образуют верхний (грудной) полувиток позвоночной спирали.
Благодаря такой структуре позвоночника действие сил
механической энергии вдоль позвоночного
столба по параллельным кинематическим цепям сразу вызывает торсию (скручивание) сегментированного
позвоночного столба вправо или влево. Торсионный характер движений
происходит преимущественно в
поясничном и нижне-грудном отделах позвоночника благодаря
противонаправленным движениям плечевого и тазового пояса, смещениям студенистых ядер латерально и назад в горизонтальной
плоскости, движениям в дуго-отростчатых
суставах вокруг ядерно-суставных и межсуставных осей. Торсия сопровождается
растяжением волокон межпозвоночных синдесмозов,
сближением, притягиванием позвонков друг к другу и увеличением компрессии
межпозвоночных дисков. Растягиваются и напрягаются те волокна синдесмозов,
направление которых совпадает с вектором действия внутренних сил механической
энергии. По мере увеличения нагрузки на позвоночный столб увеличиваются силы
растяжения волокнистых структур межпозвоночных синдесмозов, направления которых
совпадают с силовыми линиями, позвоночный столб уменьшает свою подвижность,
становится жестким и прочным. Все волокнистые
структуры синдесмозов работают только на растяжение, и направление их волокон
указывают на векторы действующих сил механической энергии, силовые линии. Последовательные перемещения сил
механической (кинетической) энергии с позвонка на позвонок сопровождаются её
уменьшением, затуханием, в том числе путем
преобразования в потенциальную
энергию растяжения волокон синдесмозов, компрессии дисков, сокращения мышц и т.
д., путем рассеяния, поглощения и диссипации
внутренних сил механической
энергии. Основная часть совокупных сил механической энергии воспринимается и компенсируется волокнистыми элементами межпозвоночных
синдесмозов за счет их растяжения.
Позвоночные двигательные сегменты SI – LIV
находятся в основании подвижного отдела позвоночника под влиянием наибольших внутренних сил механической энергии не потому, что на них оказывает давление масса тела, но потому, что они стоят
первыми на пути распространения сил механической энергии от таза и крестца на
подвижный отдел позвоночника при ходьбе.
Структурные и функциональные особенности позвоночного столба, как биодинамической
системы:
1.
На
позвоночный столб оказывают прямое непосредственное механическое влияние только
те анатомические образования, которые с позвоночным столбом имеют прямой
непосредственный контакт (кости, мышцы, связки). Эти структуры входят в
биодинамическую систему позвоночного
столба, и только они являются генераторами внутренних сил механической энергии,
которые распространяются и действуют в позвоночном столбе. Это позволяет относить
позвоночный столб к замкнутым или изолированным биодинамическим системам.
2.
Подвижный отдел позвоночного столба
представляет собой механизм с четырьмя замкнутыми кинематическими локомоторными
цепями от нижних конечностей, обладающими параллельными кинематическими
связями. Замыкаются локомоторные кинематические цепи позвоночного столба как внизу,
в области SI – LV, так и вверху, в области атлантозатылочных суставов.
3.
а) Позвоночный столб имеет форму согнутой
пологой пространственной сегментированной спирали длиной в один полный виток с
его переменным направлением.
б) В
межпозвоночных соединениях имеются подвижные.
точки опоры и эластичные диски.
в) В движениях и
удержании позвоночного столба принимают
участие синдесмозы и мышцы.
г) Позвонки формируют цепи из составных рычагов, состоящие
из несущих и несомых рычагов, в которых не действует «золотое правило» механики.
Всё это позволяет утверждать, что внутренние силы
механической энергии, в процессе их перемещения с сегмента на сегмент, уменьшают свою
величину. Поэтому внутренние силы механической энергии, действующие
в позвоночном столбе, являются затухающими,
непотенциальными силами.
4.
На
основании того, что позвоночный столб является замкнутой (изолированной)
системой тел (позвонков), в которой между позвонками действуют не потенциальные
силы, кинематические цепи позвоночного
столба относятся к категории не консервативных систем.
5.
Закон
сохранения механической энергии справедлив и действует в любой замкнутой
системе тел, силы взаимодействия между которыми потенциальны, а система
является консервативной.
6.
Вследствие
того, что позвоночный столб является замкнутой неконсервативной системой тел,
на позвоночный столб не распространяется действие Закона сохранения механической энергии, естественно при полном
действии в позвоночнике Закона сохранения и превращения энергии и Закона сохранения
количества движений.
7.
Если
в позвоночном столбе не действует закон сохранения механической энергии, его
нельзя рассматривать в качестве простого механического рычага.
Таким образом, позвоночный столб человека в
результате прогрессивной эволюции адаптирован к восприятию внутренних сил механической энергии,
действующих на тело человека при ходьбе и подъёме адекватных тяжестей.
Позвоночный столб, как целое, не обладает
анатомическими признаками и свойствами механического рычага и для расчета
силовых нагрузок в позвоночнике не может
использоваться формула M = F x d.
Постулат о действии
на межпозвоночные диски SI – LV сверх нагрузок должен быть скорректирован в сторону их
уменьшения.
Литература
1.
Нечаев В. И.
Локомоторная морфология позвоночного столба. Теория и практика. Смоленск:
Смядынь, 2005.
2. Нечаев В.И., Малащенкова Е. В. Основы теории
локомоторной морфологии позвоночного столба человека. - Математическая
морфология. Электронный математический
и медико-биологический журнал. – Т.5. – Вып. 4. – 2006. – URL: http://www.smolensk.ru/user/sqma/MMORPH/N-12html/nechaev-2/nechaev-2.htm
3.
Юдельсон Я. Б., Нечаев
В. И. Морфо-функциональные аспекты вертеброневрологии. Неврологический журнал.
– М.: Медицина, 2000 г.- Том – 5. – С. 33 – 36.
4.
Calve J., Galland M. Le nucleus pulposus intervertebral // Press med. –
1930. – Vol. 38 – P. 520 – 524.
5.
Francechini M. L Architectura
collagene delle fibrocartilagini intervertebrali // Chir. Organi mov. – 1960. –
48. – 4. 261 – 278.
6.
Mathiash H.H. Functionally und mechanische Probleme beim lumbalen und
cervicalen Bandscheibenschaden und seine Klinischen Folgen//Fortschr. Neurol.
Psychiat. – 1956. – 24 – 8, 397 – 433.
7.
Ubermuth H. Die Bedeutung der Altersveran – derungen der menchlichen
Bandscheiben fur die Pathologie der Wirdelsaule//Arch. Klin. Chir. – 1930. – 156.
– 3, 567 – 577.
Spine column of man – system
of compound levers
Nechaev V. I.*, Malashenkova E.V.**
Everyone vertebra is one
compound lever of the balance, one kinematical link, is parts of four
kinematical pairs forming four closed kinematical line of backbone. The form of a spine column is the bend flat segmented
spatial spiral with the right or left direction of half of coils depending on the side of support extremities. The
basic part of cumulative forces of mechanical energy is perceived and compensated
by fibrous elements of intervertebral continuous connections at their
stretching.On a spine column influence
of the low of preservation of mechanical energy does not extend and it
therefore cannot be considered as the simple mechanical lever.Formula M=F x d cannot be applied to
definition of power loadings in a backbone.
*The senior lecturer,
department of neurosurgery, division of peripheral nerve reconstruction.
Sourasky medical center. Tel – Aviv, Vaisman str. 8. Israel
**Boarding house for veterans of work № 31, the manager
of branch of mercy.
Moscow, Street Ostrovitjanova, the case 5.
Поступила в
редакцию 24.04.2007.