Математическая морфология.
Электронный математический и
медико-биологический журнал. - Т. 8. -
Вып. 4. - 2009. - URL:
http://www.smolensk.ru/user/sgma/MMORPH/TITL.HTM
http://www.smolensk.ru/user/sgma/MMORPH/N-24-html/TITL-24.htm
http://www.smolensk.ru/user/sgma/MMORPH/N-24-html/cont.htm
УДК
621.391.161
Результаты
математического моделирования обнаружения воздушных целей с использованием
разработанных алгоритмов компенсации излучения атмосферного фона
Ó 2009 г. Жендарев М.В.
В соответствии с
разработанной методикой проведения математического моделирования по обнаруже-нию
вертолёта был установлен адаптивный порог p для рассмотренных типов облачности. Порог
обеспечивает обнаружение целей на дальностях не менее 11 км. На основе
полученных данных были получены математические модели, описывающие зависимости
контраста излучения вертолёта от дальности обнаружения в спектральном диапазоне
8-13 мкм.
Ключевые слова:
математическое моделирование, отношение сигнал-шум, адаптивный порог.
Для проведения имитационного
моделирования процесса обнаружения воздушной цели необходимо иметь в распоряжении,
наряду с пространственным распределением фоновых излучений неба, зависимость
среднего контраста излучения летательного аппарата в полёте от дальности, т. е.
математическую модель.
Модели построены на основе
измерений собственного излучения воздушной целью типа вертолёта Ми-8 и
атмосферным фоном.
Лётно-технические
характеристики многоцелевого вертолёта Ми-8:
экипаж, чел. 3;
диаметр главного винта, м 21,29;
длина, м 18,22;
высота, м 5,65;
масса максимальная взлетная, кг 12200;
макс. скорость, км/ч 260;
крейсерская скорость, км/ч 225;
практическая дальность полёта, км 1200;
дальность действия, км 465;
практический потолок, м 4500.
База данных включает в себя
набор теплокадров ИК-изображения суточных и сезонных записей в различной
метеорологической обстановке фонов верхней полусферы. ИК-изображения, в отличие
от обычных изображений, полученных в видимой области спектра, обладают рядом
характерных особенностей [1]. Первая особенность состоит в том, что они имеют
непривычное для наблюдателя распределение контрастов между известными объектами
вследствие иного распределения оптических характеристик поверхностей в
рассматриваемом ИК-диапазоне спектра по сравнению с видимым. Другая особенность
ИК-изображений состоит в том, что в их формировании, кроме отражённого
излучения, участвует и собственное излучение ВЦ, которое определяется
излучательной способностью различных участков поверхности объектов и их
температурой. Эта особенность позволяет регистрировать объекты, как при
отсутствии падающего излучения, так и при отсутствии температурных перепадов
только за счёт различий излучательной способности их поверхностей. Кроме того,
для различных окон прозрачности ИК-диапазона также будут проявляться указанные
различия. Таким образом, ИК-изображения содержат разнообразную информацию,
отсутствующую в изображениях, получаемых в видимой области. Это, с одной
стороны, говорит об их полезности, а с другой – о трудности визуального
распознавания вследствие непривычной для человеческого глаза картины окружающей
обстановки.
Запись собственного излучения воздушной цели и атмосферного фона проводились с помощью теплопеленгатора 1ПН97М «Маугли-2М», технические характеристики которого представлены в табл. 1 [2].
Таблица 1.
Основные технические
характеристики теплопеленгатора 1ПН97М
«Маугли-2М»
|
Тип ОЭС, фирма |
Δλ, |
Поле зрения, |
Тип ФПУ/ охлаждение |
Формат элементов (пикселей), |
Фокусное расстояние, |
|
мкм |
град. |
|
пкс |
мм |
|
|
ОАО "ЛОМО" |
8÷12 |
20×15 |
Матрица PtSi/+ |
320×240 |
42 |
При проведении видеозаписи в
каждом залёте и при измерении яркостей фонов при помощи переносной метеостанции
регистрировались следующие метеорологические данные: температура, атмосферное
давление, относительная влажность воздуха.
Для проведения видеозаписей
выбирались дни, когда наблюдалась облачность с малой изменчивостью (безоблачное
небо, слоистая облачность, перистая облачность, кучевая облачность
6–9 баллов). Это позволило минимизировать погрешности, связанные с отсутствием
резких перепадов яркостей фона.
Общее количество залётов
составило 5.
Время видеозаписи в каждом залёте составляло 60 минут. Дискретность получения теплокадров изображений была 0,02 с. Это позволило проводить наблюдение на всём участке полёта. Набор теплокадров включает оцифрованные теплокадры видеосигнала, полученные с видеовыхода теплопеленгатора, после аналого-цифрового преобразования видеоизображений на выходе оптической системы.
Получившиеся файлы с
теплокадрами обрабатывались с помощью программы обработки теплокадров
"Цифровая обработка сигналов тепловизионных устройств перспективных образцов
вооружений" (рис.1).
Рис. 1. Главное окно программы
Расчётно-аналитическая
программа предназначена для применения в научных экспериментах по исследованию
и анализу свойств, характеристик сигналов тепловизионных устройств
перспективных образцов вооружений [3,4]. В данной программе реализован ряд
режимов, применение которых позволяет получать информацию о пеленгационной обстановке
из статических теплокадров, полученных в выходных каскадах тепловизионных устройств.
Прикладная составляющая программы состоит в преобразовании информации из
изображения (теплокадра) пеленга в формат электронной таблицы. Это позволяет,
для статистической обработки информации о цели, использовать полученные данные
в таких системах автоматизации научных и инженерных расчётов как, например,
MathCad. Программа реализует алгоритм анализа информации об отметке о цели, с
последующим выделением цветом. Таким образом, указывается местоположение
отметки о цели в пределах обрабатываемого растра. Программа позволяет
подсчитать количество пикселов, занимаемых изображением цели, и общее
количество пикселов в поле зрения теплопеленгатора.
При этом из видеозаписи
каждого залёта в диапазоне дальностей ВЦ от 15 до 0,01 км через каждые
100 м копировались изображения в формате BMP. Всего было получено более
1000 изображений в исследуемом ИК-диапазоне. Оцифрованные теплокадры преобразовывались
в формат электронной таблицы (массив). Каждый элемент ![]() массива
массива ![]() содержит информацию о
дискретных уровнях квантования, пропорциональных энергетической яркости
собственного излучения атмосферного фона в ячейке многоэлементного приёмника в
N-ой строке M-ого столбца. Сигнал в каждом пикселе может быть квантован по 16
777 162 уровням яркости и занимает 24 бита.
содержит информацию о
дискретных уровнях квантования, пропорциональных энергетической яркости
собственного излучения атмосферного фона в ячейке многоэлементного приёмника в
N-ой строке M-ого столбца. Сигнал в каждом пикселе может быть квантован по 16
777 162 уровням яркости и занимает 24 бита.
Для проверки разработанной процедуры вычисления количества элементов разрешения изображения вертолёта было проведено предварительное моделирование. Результаты предварительного моделирования представлены на рис. 2.
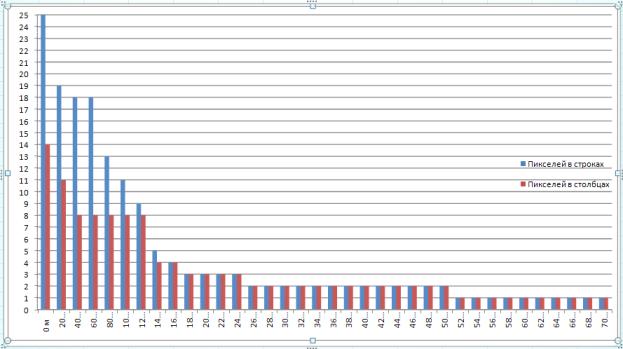
Рис. 2. Зависимость размера изображения теплового объекта от дальности
Анализ результатов
моделирования показал, что размер изображения теплового объекта, при высоте
вертолёта 5,65 м, не выходил за границы одного элемента разрешения
(пиксела) изображения атмосферного фона на дальностях более 5200 м.
Для оценки погрешности при предварительном моделировании был проведён аналитический расчёт дальности, на которой размер изображения воздушной цели (вертолёт Ми-8) находится в одном элементе разрешения (пикселе) изображения. Рисунок 3 поясняет геометрические соотношения при расчёте.
Рис. 3. Аналитический расчёт горизонтальной дальности
Аналитический расчёт ![]() (дальности цели) проводился
по формуле:
(дальности цели) проводился
по формуле:
![]() , (1)
, (1)
где α – угол
между наклонной и горизонтальной дальностями до цели;
![]() – высота цели.
– высота цели.
Поскольку высота вертолёта, и
элементарное поле зрения ОЭС известны, то было получено число элементов
разрешения вертолёта Ми-8 в массиве
изображения, в зависимости от дальности. Сравнительные результаты
аналитического расчёта и натурного моделирования представлены в таблице 2.
Таблица 2
|
|
Количество элементов разрешения (пикселов) |
||||
|
4 |
3 |
2 |
1 |
||
|
Высота вертолёта 5,65м |
Аналитический расчёт
дальности |
1295 м |
1727 м |
2590 м |
5180 м |
|
Дальность при моделировании |
1400 м |
1800 м |
2600 м |
5200 м |
|
|
Относительная погрешность, % |
7,5 |
4 |
0,4 |
0,4 |
|
Анализ результатов
приведённых в таблице 2 показал, что на дальностях свыше 2,6 км
погрешность моделирования составляет менее 1 %, что позволяет считать
разработанную процедуру вычисления количества элементов разрешения изображения
вертолёта работоспособной и достоверной.
Таким образом, нахождение ВЦ
на дальностях свыше 5200 м на матричном индикаторе (например, ЖКИ или LED)
будет проявляться в виде контрастного изображения в один пиксель.
В процессе первого этапа
моделирования определялись средние значения и дисперсия флюктуаций контраста
излучения фона и вертолёта.
Модели излучения ВЦ
представлены средними контрастами излучения, полученными на различных по типу
облачности, фонах и дальностях.
Средний контраст теплового
излучения рассчитывался по формуле
![]() , (1)
, (1)
где ![]() - среднее значение
контраста излучения тепловой цели (вертолёта);
- среднее значение
контраста излучения тепловой цели (вертолёта);
![]() - среднее значение
уровня квантования сигнала фона, на котором наблюдается тепловая цель.
- среднее значение
уровня квантования сигнала фона, на котором наблюдается тепловая цель.
Полученные значения для
разных типов облачности записаны в таблицах 3÷6.
Таблица 3.
Перистая облачность
|
Дальность до цели |
Среднее значение уровня квантования сигнала фона |
Дисперсии уровня квантования сигнала фона |
Среднее значение контраста излучения цели |
|
3000 м |
7089732 |
1777460182442 |
8520705 |
|
3500 м |
7125833 |
1796514987021 |
8392315 |
|
4000 м |
7355500 |
1705622140952 |
7096864 |
|
4500 м |
7417307 |
1795727219734 |
6706371 |
|
5000 м |
7414086 |
1799534765062 |
6523373 |
|
5500 м |
7435570 |
1719295220927 |
6301191 |
|
6000 м |
7471172 |
1709183078380 |
5961283 |
|
6500 м |
7093913 |
1704388242937 |
6238210 |
|
7000 м |
7232983 |
1728240064345 |
5972625 |
|
7500 м |
7407060 |
1788730213256 |
5615092 |
|
8000 м |
7442990 |
1726572329726 |
5413625 |
|
8500 м |
7357610 |
1723219748849 |
5134400 |
|
9000 м |
7486795 |
1735604985434 |
4778360 |
|
9500 м |
7434580 |
1729846776540 |
4642962 |
|
10000 м |
7274896 |
1799543600905 |
4586593 |
|
10500 м |
7170581 |
1728740607146 |
3835233 |
|
11000 м |
7385854 |
1794899434577 |
3614148 |
Таблица 4.
Кучевая облачность
7÷9 баллов
|
Дальность до цели |
Среднее значение контраста излучения фона |
Дисперсии флюктуаций контраста излучения |
Среднее значение контраста излучения цели |
|
3000 м |
8160171 |
2858561844463 |
7450266 |
|
3500 м |
8233584 |
2888489344022 |
7284564 |
|
4000 м |
7902044 |
2838285173363 |
6550320 |
|
4500 м |
8326404 |
2888429906345 |
5797274 |
|
5000 м |
8216802 |
2814562234188 |
5720657 |
|
5500 м |
8127961 |
2858429985013 |
5608800 |
|
6000 м |
8033571 |
2878327880160 |
5398884 |
|
6500 м |
8189377 |
2828520732773 |
5142746 |
|
7000 м |
8360846 |
2838562381441 |
4844762 |
|
7500 м |
8497159 |
2858429975604 |
4524993 |
|
8000 м |
8286836 |
2838529971477 |
4569779 |
|
8500 м |
8060482 |
2878528871208 |
4431528 |
|
9000 м |
8213694 |
2806348147259 |
4051461 |
|
9500 м |
8322025 |
2848634076586 |
3755517 |
|
10000 м |
8216433 |
2858427754409 |
3645056 |
|
10500 м |
8246502 |
2828528055628 |
2759312 |
|
11000 м |
7927961 |
2838576581047 |
2472041 |
Таблица 5.
Слоистая облачность
|
Дальность до цели |
Среднее значение контраста излучения фона |
Дисперсии флюктуаций контраста излучения |
Среднее значение контраста излучения цели |
|
3000 м |
8680475 |
1172551241275 |
6929962 |
|
3500 м |
8733754 |
1142554509657 |
6784394 |
|
4000 м |
8637839 |
1132564598100 |
5814525 |
|
4500 м |
8545244 |
1192574563782 |
5578434 |
|
5000 м |
8491559 |
1152563467867 |
5445900 |
|
5500 м |
8637079 |
1162553647580 |
5099682 |
|
6000 м |
8780475 |
1145852436573 |
4651980 |
|
6500 м |
8633754 |
1139873758698 |
4698369 |
|
7000 м |
8549894 |
1175572647581 |
4655714 |
|
7500 м |
8647829 |
1148752310979 |
4374323 |
|
8000 м |
8718436 |
1148651023543 |
4138179 |
|
8500 м |
8497420 |
1144472239864 |
3994590 |
|
9000 м |
8643205 |
1109566844307 |
3621950 |
|
9500 м |
8637100 |
1145567684434 |
3440442 |
|
10000 м |
8572310 |
1166523761108 |
3289179 |
|
10500 м |
8587320 |
1172563765891 |
2418494 |
|
11000 м |
8656108 |
1162241265490 |
2343894 |
Таблица 6.
Ясное небо
|
Дальность до цели |
Среднее значение контраста излучения фона |
Дисперсии флюктуаций контраста излучения |
Среднее значение контраста излучения цели |
|
3000 м |
6394563 |
1532560097935 |
9215873 |
|
3500 м |
6525935 |
1544582354480 |
8992213 |
|
4000 м |
6427532 |
1529056784362 |
8024832 |
|
4500 м |
6510331 |
1570562386679 |
7613347 |
|
5000 м |
6329888 |
1564387765128 |
7607571 |
|
5500 м |
6516689 |
1570123385483 |
7220071 |
|
6000 м |
6603527 |
1539904526886 |
6828928 |
|
6500 м |
6629792 |
1522310954559 |
6702330 |
|
7000 м |
6516908 |
1514476894483 |
6688700 |
|
7500 м |
6520021 |
1563487610990 |
6502131 |
|
8000 м |
6223423 |
1555478547781 |
6633191 |
|
8500 м |
6527263 |
1528901326675 |
5964746 |
|
9000 м |
6525373 |
1505848720997 |
5739782 |
|
9500 м |
6624077 |
1568872018547 |
5453464 |
|
10000 м |
6423011 |
1513364789393 |
5438477 |
|
10500 м |
6510376 |
1529210092574 |
4495437 |
|
11000 м |
6393256 |
1532397481029 |
4606745 |
Поскольку проводилась
многократная обработка теплокадров, в ячейки таблиц заносились усреднённые
значения контраста и дисперсии его флюктуаций для соответствующих дальностей и
различных типов облачности. Таким образом, формировались табличные модели
излучения исследуемого вертолёта, которые являлись исходными для получения
математических моделей.
Немаловажным является вопрос
о выборе количества теплокадров, необходимых для проведения исследования контраста
излучения цели по предлагаемой методике. При этом следует стремиться к тому,
чтобы доверительный интервал для полученных оценок не превышал наперёд заданной
величины.
Необходимо отметить, что при
углах обзора 0°÷20° в верхней полусфере сильно проявляется взаимное
экранирование облаками друг друга. Закон распределения плотности вероятностей
контраста излучения цели в таких условиях будет близким к нормальному.
При углах обзора больше 20
градусов границы облаков будут более теплыми по сравнению с другой частью
облаков, следовательно тепловые отметки ВЦ на границах облаков, на экране
тепловизора имеют меньший контраст. Это будет приводить к полимодальному закону
распределения плотности вероятностей контраста излучения цели. Однако объём
таких значений на экране ОП ОЭС, например, для кучевой облачности 7–9 баллов
будет составлять единицы процентов.
Таким образом,
представляется возможным использовать методику получения доверительного
интервала для нормального закона распределения описанного в [7].
Если по результатам
оцифровки изображения определён контраст излучения вертолёта ![]() и дисперсия его
флюктуаций
и дисперсия его
флюктуаций ![]() , представляется возможным определить среднее квадратическое
отклонение оценки
, представляется возможным определить среднее квадратическое
отклонение оценки ![]() :
:
![]() ,
(2)
,
(2)
где ![]() – среднее
квадратическое отклонение оценки
– среднее
квадратическое отклонение оценки ![]() ;
;
n – количество повторных измерений.
В этом случае доверительный
интервал, который накрывает оценку ![]() с доверительной
вероятностью
с доверительной
вероятностью ![]() , будет равен
, будет равен
![]() ,
, ![]() ,
,
а протяжённость
доверительного интервала составит
![]() , (3)
, (3)
где ![]() – определяется из
специальной таблицы [45] по заданной величине доверительной вероятности
– определяется из
специальной таблицы [45] по заданной величине доверительной вероятности ![]() .
.
Для решения обратной задачи,
связанной с нахождением требуемого количества обработанных теплокадров,
необходимо задаться допустимой величиной доверительного интервала, например, ![]() и найти из выражения
(3) требуемое значение
и найти из выражения
(3) требуемое значение ![]()
 ,
,
а затем, подставив выражение
(2), можно определить требуемое количество теплокадров
 . (4)
. (4)
Учитывая то, что описанная
методика требует знания средних значений контраста излучения вертолёта и
дисперсий его флюктуаций, то точно заранее вычислить количество необходимых для
обработки теплокадров не представляется возможным. Поэтому их следует
определять либо на основании результатов предварительного моделирования, либо
уточнять их количество в процессе его проведения, когда появляется возможность
получения оценок ![]() и
и ![]() .
.
Результаты
предварительного моделирования
приведены в таблице 7. В которой представлены значения оценок квантованной
яркости излучения цели и дисперсий её флюктуаций. Из них следует, что в
процессе оцифровки полученный контраст излучения в обработанных кадрах имеет
разные значения. В связи с этим целесообразно большее количество теплокадров обрабатывать
на дальностях, где ожидается наибольшая дисперсия флюктуаций. При определении
требуемого количества теплокадров следует ориентироваться на наибольшие
значения дисперсий, наблюдаемых при обработке. В этом случае в “наихудших
кадрах” с доверительной вероятностью (например, 0,95) доверительный интервал не
будет превышать 10 % от измеряемой величины ![]() , а на других дальностях он будет меньшим, т. е.
обеспечивается избыточность количества теплокадров.
, а на других дальностях он будет меньшим, т. е.
обеспечивается избыточность количества теплокадров.
Таблица 7.
Результаты предварительной оценки
квантованной яркости излучения вертолёта и дисперсий её флюктуаций в диапазоне
8÷13 мкм (тип облачности - перистая).
|
Дальность до цели |
Средние значения уровней квантованной яркости |
Дисперсии флюктуаций яркости |
|
15610436 |
4,00928E+11 |
|
|
3500 м |
15518148 |
4,71313E+11 |
|
4000 м |
14452364 |
4,70430E+11 |
|
4500 м |
14123678 |
4,66393E+11 |
|
5000 м |
13937459 |
4,66634E+11 |
|
5500 м |
13736761 |
4,67577E+11 |
|
6000 м |
13432455 |
4,40316E+11 |
|
6500 м |
13332123 |
4,17297E+11 |
|
7000 м |
13205608 |
4,25890E+11 |
|
7500 м |
13022152 |
4,89774E+11 |
|
8000 м |
12856615 |
4,96430E+11 |
|
8500 м |
12492010 |
4,05627E+11 |
|
9000 м |
12265155 |
4,24608E+11 |
|
9500 м |
12077542 |
4,44224E+11 |
|
10000 м |
11861489 |
4,54360E+11 |
|
10500 м |
11005814 |
4,15183E+11 |
|
11000 м |
11000002 |
4,86859E+11 |
На основании изложенного подхода были определены значения требуемого количества теплокадров, необходимых для проведения моделирования. Результаты представлены в таблице 8.
Таблица 8.
План отбора теплокадров, необходимого для проведения
моделирования
|
Дальность до цели, м |
3000 м |
3500 м |
4000 м |
4500 м |
5000 м |
5500 м |
6000 м |
6500 м |
7000 м |
|
Количество теплокадров |
25 |
30 |
35 |
36 |
37 |
38 |
38 |
36 |
38 |
|
Дальность до цели, м |
7500 |
8000 |
8500 м |
9000 м |
9500 м |
10000 м |
10500 м |
11000 м |
11500 м |
|
Количество теплокадров |
44 |
46 |
40 |
43 |
47 |
50 |
53 |
62 |
64 |
Таким образом, для получения
достоверных оценок контраста излучения с доверительной вероятностью 0,95
потребуется провести обработку, не менее 64 теплокадров. Кроме того необходимо
ограничивать объём выборки таким образом, чтобы за время её получения вертолёт
пролетал незначительное расстояние. Скорость полёта вертолёта Ми-8 составляла
220 км/ч (61 м/с), поэтому расстояние в 100 м он пролетал за
1,64 с, что соответствовало объёму выборки (при дискретности регистрации
0,02 с) 82 отсчёта. При проведении моделирования были использованы выборки
объёмом 65 теплокадров.
Полученные табличные модели
излучения вертолёта Ми-8 позволяют выявить зависимости средних значений яркости
излучения и дисперсий её флюктуаций в диапазоне длин волн 8÷13 мкм от
дальности наблюдения цели. Их достоверность обеспечивается достаточными
объёмами выборок, использовавшихся при определении характеристик излучения.
Табличные модели излучения цели использовались при имитационном моделировании
процесса обнаружения вертолёта оптико-электронным обнаружителем.
Имитационное моделирование
выполнялось с использованием программы "Моделирование процесса
пространственной фильтрации тепловых объектов на коррелированном излучающем
фоне" (рисунок 4). Описание программы приведено в [5,6].
Технические возможности ЭВМ
и разработанное программное обеспечение позволило провести имитационное моделирование
по обнаружению целей с временным интервалом съёма данных 0,5 с.
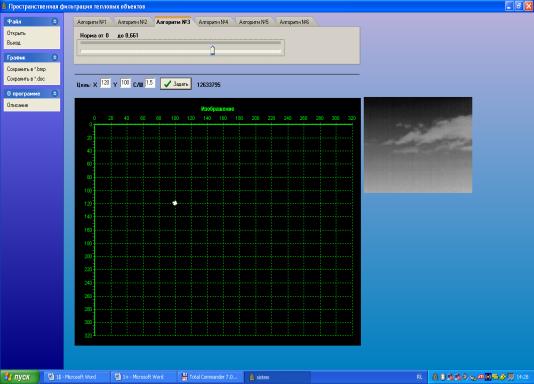
Рис. 4. - Основная форма приложения (фрагмент окна
программы)
В существующих способах
выделения отметки сигнала от объекта в системах обнаружения с матричными
приёмниками излучения [8,9] используют алгоритм порогового обнаружения с
настройкой порога срабатывания Uo
по оценке среднеквадратического значения суммы фонового и внутреннего шумов Uш как Uo=k![]() Uш. Коэффициент k, как правило, выбирается из условия обеспечения заданной
вероятности обнаружения при частоте ложных тревог, не превышающей требуемую.
Например, для обеспечения вероятности обнаружения 0,9 при частоте ложных тревог
3·10-3 требуется значение k=6.
При этом предполагают, что двумерное поле яркости случайного фона имеет
нормальный закон распределения. Недостатком такого способа является
необходимость получения заблаговременной информации о характеристиках фона для
выставления адаптивного порога срабатывания на весь кадр. К сожалению, такой
подход для многих ОЭС труднореализуем.
Uш. Коэффициент k, как правило, выбирается из условия обеспечения заданной
вероятности обнаружения при частоте ложных тревог, не превышающей требуемую.
Например, для обеспечения вероятности обнаружения 0,9 при частоте ложных тревог
3·10-3 требуется значение k=6.
При этом предполагают, что двумерное поле яркости случайного фона имеет
нормальный закон распределения. Недостатком такого способа является
необходимость получения заблаговременной информации о характеристиках фона для
выставления адаптивного порога срабатывания на весь кадр. К сожалению, такой
подход для многих ОЭС труднореализуем.
В ходе проведения
моделирования выявлялся диапазон адаптивного порога p по обнаружению вертолёта
при разных отношениях сигнал-шум, для различных дальностей и типов облачности. Диапазон
изменений порога находится в пределах
значений (0,001÷0,999). В качестве исходных данных использовались
результаты, приведённые в таблицах 3-7, в строках которых сосредоточены
усреднённые значения яркости излучения и дисперсии её флюктуаций при различных
значениях дальности. Из имеющейся базы моделей фона были отобраны 2000 массивов
изображений ![]() , полученных в спектральном диапазоне 8÷13 мкм,
размером 320×240 пикселей. Массивы изображения
, полученных в спектральном диапазоне 8÷13 мкм,
размером 320×240 пикселей. Массивы изображения ![]() охватывают верхнюю
полусферу от горизонта до 15° и имеют больший размер по азимуту 20°. В набор
массивов изображений
охватывают верхнюю
полусферу от горизонта до 15° и имеют больший размер по азимуту 20°. В набор
массивов изображений ![]() включены результаты
дневной и ночной видеосъёмки в летний сезон для следующих типов облачности:
ясная, кучевая, слоистая, перистая. Каждый из перечисленных типов облачности
включал в себя по 500 массивов изображений[8].
включены результаты
дневной и ночной видеосъёмки в летний сезон для следующих типов облачности:
ясная, кучевая, слоистая, перистая. Каждый из перечисленных типов облачности
включал в себя по 500 массивов изображений[8].
Сигнал от вертолёта
накладывался на выбранный массив изображения фона ![]() в виде контрастной отметки единичного дискретного элемента
(пиксела) un,m. Номера строки и столбца отметки в случайно выбранном пикселе
un,m в массиве изображения
в виде контрастной отметки единичного дискретного элемента
(пиксела) un,m. Номера строки и столбца отметки в случайно выбранном пикселе
un,m в массиве изображения ![]() выбиралось по равномерному закону. Отношение сигнал-шум
отметки создавалось из соотношения
выбиралось по равномерному закону. Отношение сигнал-шум
отметки создавалось из соотношения
 ,
(5)
,
(5)
где ![]() - дисперсия флуктуаций
контраста излучения атмосферного фона,
- дисперсия флуктуаций
контраста излучения атмосферного фона,
![]() – пиковое значение квантованного сигнала цели [8,9].
– пиковое значение квантованного сигнала цели [8,9].
В качестве «накладываемого»
сигнала использовалась величина среднего контраста излучения вертолёта, который
выбирался из таблицы 7 для соответствующего типа облачности и дальности.
Процедура наложения сигнала повторялась 100 раз для каждого кадра.
Таблица 9.
Значения
адаптивного порога для исследуемых типов облачности
|
Тип облачности |
Дальность обнаружения 11 км |
Дальность обнаружения 12 км |
|
Ясная |
0,061 |
0,056 |
|
Перистая |
0,074 |
0,068 |
|
Слоистая |
0,081 |
0,074 |
|
Кучевая |
0,123 |
– |
Анализ полученных результатов изменения адаптивного порога для исследуемых типов облачности показал (таблица 9), что порог срабатывания уменьшается с увеличением отношения сигнал-шум. В результате установлены граничные пороговые значения, для соответствующих типов облачности обеспечивающие обнаружение цели типа вертолёт Ми-8 на дальностях не менее 12 км. Установлено, что значение порога зависит от дисперсии фонового шума кадра. С увеличением дисперсии, уменьшается значение порога для обнаружения цели. В предлагаемом способе порог срабатывания выбирается при однократном просмотре. При этом порог автоматически отслеживает характер изменения уровня фона, т. е. является адаптивным (порог изменяется в пределах одного кадра).
Литература
1. Сафронов Ю. П., Эльман Р. И. Инфракрасные
распознающие устройства. М., Воениздат, 1976. 207 с.
2. Чупраков А.
М., Хитрик А. С. Тепловизионный прицел на основе матричного болометрического
приемника. //Оптико–электронные системы визуализации и обработки оптических
изображений.// Вып. 2. - М.: ЦНИИ
«Циклон». 2007. С. 60-71.
3. Жендарев М.
В., Якименко И. В. , и др. Цифровая обработка сигналов тепловизионных устройств
перспективных образцов вооружений. // Программа ЭВМ. ФГУП «Всероссийский
научно-технический центр». Отраслевой фонд алгоритмов и программ Государственного
координационного центра информационных технологий. Инв. Номер 50200900390.
4. Жендарев М.
В., Якименко И. В. , и др. Государственная Академия Наук Российская академия
образования. Институт информатизации образования. г. Москва. Свидетельство об отраслевой регистрации
электронного ресурса. №00041.
5. Жендарев М.
В., Якименко И. В. , и др. Цифровая обработка сигналов тепловизионных устройств
перспективных образцов вооружений. // Программа ЭВМ. ФГУП «Всероссийский
научно-технический центр». Отраслевой фонд алгоритмов и программ Государственного
координационного центра информационных технологий. Инв. Номер 50200900396.
6. Жендарев М.
В., Якименко И. В. , и др. Государственная Академия Наук Российская академия
образования. Институт информатизации образования. г. Москва. Свидетельство об отраслевой регистрации электронного
ресурса. №00042.
7. Вентцель Е.
С. Теория вероятностей. М., Высш. школа, 2001. – 576 с.
8. Жендарев М. В., Бирюков С.И. Разработка математического обеспечения
для проведения натурных измерений собственных излучений воздушных целей в
инфракрасном диапазоне длин волн. Статья. Конкурс молодых ученых Смоленской
области, 2006. С. 184-189.
9. Жендарев М. В.
Корреляционный способ обнаружения тепловых объектов теплопеленгаторами на
атмосферном фоне. ВА ВПВО ВС РФ. г. Смоленск. Вестник войсковой ПВО. Выпуск №1.
2009. Стр. 91-94.
RESULTS OF MATHEMATICAL MODELING OF THE
FINDING AIR INTEGER WITH USE DESIGNED ALGORITHM TO COMPENSATIONS OF THE
RADIATION OF THE ATMOSPHERIC BACKGROUND
Zhendarev
M. V.
In
accordance with designed by methods of the undertaking of mathematical modeling
adaptive threshold p was installed on finding helicopter for considered types
to cloud. Threshold provides finding an integer on range not less 11 km. On
base got data were received mathematical models, describing dependencies of the
contrast of the radiation helicopter from range of the finding in spectral
range 8-13 мкм.
Key words: mathematical modeling.
Кафедра радиотехники
Академия
войсковой ПВО Вооруженных Сил РФ
им.
Маршала Советского Союза А. М. Василевского, г. Смоленск
Поступила в редакцию 18.11.2009.