Математическая морфология.
Электронный математический и
медико-биологический журнал. - Т. 10. -
Вып. 2. - 2011. - URL:
http://www.smolensk.ru/user/sgma/MMORPH/TITL.HTM
http://www.smolensk.ru/user/sgma/MMORPH/N-30-html/TITL-30.htm
http://www.smolensk.ru/user/sgma/MMORPH/N-30-html/cont.htm
УДК 621. 396. 677
способ
пеленгации воздушных объектов станцией наведения в инверсной полуактивной
системе самонаведения
Ó 2011 г. Лайко E.
А.
Рассмотрен
способ моноимпульсной обработки на земле отраженных от воздушного объекта
сигналов, излучаемых бортовой станцией подсвета для определения пеленга воздушной
цели относительно антенны бортовой станции. Обоснована возможность фазовой
суммарно-разностной пеленгации воздушного объекта на земле относительно бортовой
станции, антенна которой излучает сигналы подсвета на разных частотах секторами
с разными фазовыми центрами.
Ключевые
слова:
способ, сигналы, воздушная цель,
антенна, пеленгации воздушного объекта.
Одной из существенных проблем
радиолокационной скрытности наземных станций наведения в полуактивных и комбинированных
системах управления является необходимость длительного радиоизлучения в сторону
пеленгуемого воздушного объекта (ВО). Традиционная полуактивная система
самонаведения зенитного ракетного комплекса (ЗРК) включает наземную станцию
подсвета и зенитную управляемую ракету (ЗУР) с пассивным радиопеленгатором
радиолокационной головки самонаведения (РГС), принимающим отраженные от ВО
сигналы [1], обрабатываемые известными методами радиопеленгации [2].
Основным недостатком
традиционных полуактивных систем является их низкая радиолокационная
скрытность, обусловленная тем, что наземная станция подсвета вынуждена излучать
сигнал в направлении ВО, пеленгуемой со стороны ЗУР. При этом СУ на земле по отраженным
от ВО сигналам должна определять углы рассогласования ВО относительно
оптической оси антенны РГС.
На рис. 1 представлена
структурная схема инверсной полуактивной бистатической системы самонаведения с
частотным разделением каналов. Радиолокационная головка самонаведения ЗУР имеет
антенну, состоящую из четырех секторов 1, 2, 3 и 4 с характеристиками направленности
на передачу ![]() и
и ![]() , где
, где ![]() и
и ![]() –углы рассогласования ВО относительно
равносигнального направления антенны РГС в вертикальной и горизонтальной
плоскостях. К каждому из этих секторов подключены передатчики (ПРД), которые
формируют для соответствующих секторов антенны радиосигналы на несущих частотах
f1,
–углы рассогласования ВО относительно
равносигнального направления антенны РГС в вертикальной и горизонтальной
плоскостях. К каждому из этих секторов подключены передатчики (ПРД), которые
формируют для соответствующих секторов антенны радиосигналы на несущих частотах
f1, ![]() ,
, ![]() ,
, ![]() , где Df – шаг перестройки частоты.
, где Df – шаг перестройки частоты.
Сигналы на частотах f1, f2, f3 и f4 излучаются секторами антенны
в направлении ВО, рассеиваются им и достигают антенны наземной СУ, коэффициент
направленного действия антенны которой в направлении ВО для каждой из частот
равен ![]() и
и ![]() соответственно.
соответственно.
Для обеспечения когерентности
обработки предусмотрена возможность передачи опорных сигналов с ЗУР на землю
(рис. 1). Поэтому ЗУР имеет опорную антенну, которая излучает опорные сигналы
на четырех частотах. Причем для развязки опорных сигналов от сигналов, отраженных
от ВО, перед излучением опорных сигналов необходимо перенести их в другой диапазон
частот. В частности такую операцию можно выполнить на цифровых делителях
частоты, способных функционировать на частотах свыше 8 ГГц.
Рисунок 1 –
Структурная схема инверсной полуактивной системы
Частоты опорных сигналов
делятся в N раз, затем смешиваются в сумматоре
и поступают на общую передающую антенну опорного канала ЗУР. Опорный приемник
СУ принимает опорные сигналы, усиливает их и передает в преобразователь частоты,
на который поступает также сигнал с местного гетеродина на частоте ![]() . После преобразования спектр опорных сигналов на частотах
. После преобразования спектр опорных сигналов на частотах ![]() ,
, ![]() ,
, ![]() и
и ![]() переносится на промежуточные
частоты, равные
переносится на промежуточные
частоты, равные ![]() ,
, ![]() ,
, ![]() и
и ![]() . Перенос опорных частот на промежуточную выполняется для обеспечения
разделения сигналов на частотные каналы, т.к. разница между ними может
составлять от единиц до десятков мегагерц.
При такой разнице частот отделить их на СВЧ сложно из-за трудностей
изготовления узкополосных полосовых фильтров.
. Перенос опорных частот на промежуточную выполняется для обеспечения
разделения сигналов на частотные каналы, т.к. разница между ними может
составлять от единиц до десятков мегагерц.
При такой разнице частот отделить их на СВЧ сложно из-за трудностей
изготовления узкополосных полосовых фильтров.
На промежуточных частотах
опорные сигналы выделяются полосовыми фильтрами опоры (рис. 1), каждый из
которых настроен на свою промежуточную частоту. После разделения опорных частот
они тем же сигналом местного гетеродина переносятся по частоте вверх, тем самым
устраняется сдвиг фазы, вносимый местным гетеродином. После преобразователей частоты
каждый выделенный опорный сигнал поступает на умножитель частоты, коэффициент
умножения которого равен N. Таким образом, на преобразователи
частоты головного приемника СУ будут раздельно поступать четыре опорных
сигнала, каждый в свой преобразователь. После преобразования и фильтрации
низкой частоты можно получить комплексные огибающие сигналов, изменяющиеся с
частотами Доплера ![]() ,
,![]() ,
,![]() и
и![]() , которые определяются изменением расстояний прохождения головных и опорных
сигналов.
, которые определяются изменением расстояний прохождения головных и опорных
сигналов.
Амплитуды разностных и суммарного сигналов можно определять
как [3]:
![]() ; (1)
; (1)
![]() ; (2)
; (2)
![]() ; (3)
; (3)
Анализ (1–3) показывает, что в
составе сигналов разностных и суммарного каналов присутствуют комплексные амплитуды
с паразитной разностью фаз, определяемой разностью частот излучения. Поэтому
прежде чем оценивать пеленги, необходимо в сигналы второго, третьего и
четвертого парциалов внести поправки на разность фаз ![]() , 2
, 2![]() и 3
и 3![]() , обусловленной текущей геометрией объектов на момент начала накопления
выборки, когда дальности равны
, обусловленной текущей геометрией объектов на момент начала накопления
выборки, когда дальности равны ![]() ,
, ![]() и
и ![]() .
.
Для знания значений начальной
фазы надо знать значения дальностей на текущий момент времени. Например,
суммарная ошибка знания дальностей в 5 м выливается в 6![]() ошибки
оценки разности фаз. Поэтому каждый раз при оценивании пеленгов необходимо
различными методами поиска подбирать адекватные значения разности фаз,
изменение которых следует экстраполировать на следующий такт оценивания. После
экстраполяции необходимо при наличии комплексных амплитуд звенящих фильтров
ДПФ.
ошибки
оценки разности фаз. Поэтому каждый раз при оценивании пеленгов необходимо
различными методами поиска подбирать адекватные значения разности фаз,
изменение которых следует экстраполировать на следующий такт оценивания. После
экстраполяции необходимо при наличии комплексных амплитуд звенящих фильтров
ДПФ.
При одной и той же разности
частот излучения разность фаз ![]() между сигналами на соседних
частотах одинакова. Ее величина находится в пределах от нуля до 360 градусов.
Эту разность фаз можно искать по максимуму суммарного сигнала. Введем векторы
амплитуд суммарного и разностных каналов канала в k-м дискрете Доплера вида
между сигналами на соседних
частотах одинакова. Ее величина находится в пределах от нуля до 360 градусов.
Эту разность фаз можно искать по максимуму суммарного сигнала. Введем векторы
амплитуд суммарного и разностных каналов канала в k-м дискрете Доплера вида
![]() ,
,
![]() ,
,
![]() .
.
и фокусирующий вектор
![]() .
.
Построим результирующую
амплитуду суммарного канала в виде
![]() . (4)
. (4)
Изменяя угол фазирования φ от 0 до 360º, найдем значение фазы φ, при которой преобразование Фурье ![]() имеет максимум (рис. 2).
имеет максимум (рис. 2).
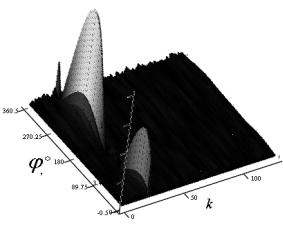
Рисунок 2 –
Дискретные преобразования Фурье для различных
фокусирующих
множителей с фазой φ
Найдя значение фазы, при
которой суммарная амплитуда (4) имеет максимум, используем эту фазу для
фазирования разностных каналов, т. е.
![]() ; (5)
; (5)
![]() . (6)
. (6)
Найдя сфокусированные
комплексные амплитуды суммарного и разностных каналов для величины φ, при которой амплитуда суммарного канала достигает
максимума, можно определить пеленги ВО по углу места и азимуту относительно равносигнального
направления антенны РГС ЗУР (рис. 3).
δε° δβ°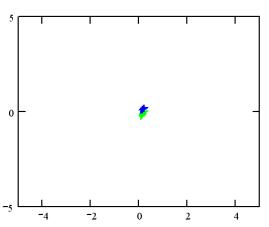
Рисунок 3 – Пеленги
ВО (истинный и после фокусировки по сигналам)
Таким образом, при построении инверсной
полуактивной системы самонаведения одним из важных вопросов является фазовая
фокусировка доплеровских портретов, которая необходима в связи с разностью
частот излучения парциалами антенны. В настоящей статье показан вариант фазовой
фокусировки доплеровских спектров методом максимума суммарного сигнала. Для
фокусировки можно также использовать и методы минимума среднеквадратической
оценки, и им подобные методы, приводящие, так или иначе к одному и тому же результату.
Для реализации инверсной полуактивной
системы можно использовать и временное разделение каналов, однако в этом случае
также потребуется фазовая фокусировка доплеровских портретов, компенсирующая
сдвиги фаз за счет движения ВО. Таким образом, анализ моделей сигналов
показывает возможность применения фазовых методов пеленгации в инверсных бистатических
радиолокационных системах при условии фазовой фокусировки сигналов.
Литература
1.
Демидов
В. П., Кутыев Н. Ш. Управление зенитными ракетами. 2-е изд., перераб. и доп.
М., Воениздат, 1989. – 335 с.
2.
Леонов
А. И., Фомичев К. И. Моноимпульсная радиолокация. 2-е изд. М., Радио и связь, 1984. – 312 с.
3.
Лайко
Е. А., Григорян Д. С. Моноимпульсная пеленгация цели в наземной точке приема
относительно бортовой станции подсвета в бистатической радиолокационной системе
Радиолокация навигация связь. Том
3. 2010. – 2254 – 2261с.
air vehicleS direction
finding method having used the guidance station into the inverse semiactive homing system
Layko E. A.
The way of monopulse processing on the
ground, reflected from the target signals, radiated by the illumination
airborne radar, to determine the target bearing concerning the airborne antenna
is considered. The possibility of use phase sum-difference air-to-air direction
finding on the ground concerning the airborne antenna which radiates
illumination signals at different frequencies by the sectors with different
phase centers is proved.
Key words: Way,
signals, air target, the aerial, direction finding of air object.
Военная академия войсковой ПВО Вооруженных Сил
Российской Федерации
имени Маршала Советского Союза А.М.
Василевского (ВА ВПВО ВС РФ)
Поступила в редакцию 21.02.2011