Математическая морфология.
Электронный математический и
медико-биологический журнал. - Т. 10. -
Вып. 2. - 2011. - URL:
http://www.smolensk.ru/user/sgma/MMORPH/TITL.HTM
http://www.smolensk.ru/user/sgma/MMORPH/N-30-html/TITL-30.htm
http://www.smolensk.ru/user/sgma/MMORPH/N-30-html/cont.htm
УДК
623.451
ПРОСТРАНСТВЕННАЯ ИМИТАЦИОННАЯ МОДЕЛЬ КОНТУРА ТЕЛЕНАВЕДЕНИЯ ЗУР ДЛЯ ИССЛЕДОВАНИЯ СТРЕЛЬБЫ В ДВИЖЕНИИ
Ó
2011 г. Желнин А. А.
В статье представлена
разработанная имитационная модель теленаведения зенитной управляемой ракеты для
использования при оценке эффективности стрельбы в движении зенитных ракетных
комплексов ближнего действия и малой дальности.
Ключевые слова: контур теленаведения, имитационная
модель теленаведения ЗУР.
В современном
высокоманевренном бою с применением противником ВТО (высокоточное оружие)
подразделения и части ВПВО (войсковой ПВО) должны обеспечивать непрерывное и
устойчивое прикрытие общевойсковых подразделений, частей и соединений от ударов
воздушного противника во всех видах боевых действий и на марше сохраняя при
этом требуемый уровень живучести зенитных комплексов (ЗК). Исходя из этого и на
основании современных требований к перспективным зенитным ракетным комплексам
малой дальности и ближнего действия (ЗРК МД и БД), необходимо дальнейшее повышение
боевых возможностей зенитных комплексов, а также придание им новых свойств, например
возможности стрельбы зенитной управляемой ракетой (ЗУР) с теленаведением в
движении.
Проведенные в этом
направлении исследования показали что, реализация в зенитных комплексах
ближнего действия и малой дальности с теленаведением, стрельбы ЗУР в движении,
позволит [1]:
повысить огневую
производительность огневых средств зенитных комплексов;
повысить математическое
ожидание числа уничтоженных за налет воздушных целей подразделением ВПВО;
создать условия для
повышения живучести огневых средств зенитных комплексов;
обеспечить повышение
эффективности ЗРК БД путем расширения диапазона решений на отражение удара
воздушного противника, принимаемых командиром подразделения ВПВО, за счет
уменьшения занятости целевого канала ведущего стрельбу или меняющего стартовую
позицию.
Для определения возможности
стрельбы ЗУР в движении необходимо построить пространственную имитационную
компьютерную модель контура теленаведения ЗУР и адекватно задать на нее входные
воздействия получаемые от воздушной цели (ВЦ) и самохода при движении по трассе
характерного профиля. В качестве среды компьютерного моделирования (СКМ) выберем
основной пакет расширения SIMULINK СКМ MATLAB. Модель должна обеспечивать:
имитацию параметров движения
цели с маневром любой степени сложности;
имитацию движения зенитной
самоходной установки ЗСУ по трассе любого профиля;
пуск ЗУР в любое время после
захвата ВЦ на автосопровождение, как с места, так и в движении;
имитацию наведения ЗУР на ВЦ
с отображением угловых и линейных ошибок наведения и конечного промаха ЗУР.
Функциональная структура
контура теленаведения, как известно, образуется зенитной ракетой, которая с
автопилотом составляют бортовую систему управления, и средствами наведения,
состав которых определяется способом управления. Обобщенная функциональная
схема контура теленаведения приведена на рисунке 1. Звено динамики ракеты (ЗДР)
и кинематическое звено (КЗ) образуют объект управления. В состав автоматического
управляющего устройства входят координаторы цели и ракеты (КЦ и КР), устройство
выработки команд (УВК), командная радиолиния управления (КРЛУ) и автопилот (АП) [2].
Рисунок 1 – Функциональная
схема контура теленаведения
На рисунке 2 представлена
структурная операторная схема контура теленаведения ЗУР. На рисунке обозначено:
ПОО – прицельно-оптическое
оборудование;
СИУК – система измерения
углов качек;
ЦВС – цифровая вычислительная
система;
КЗ – кинематическое звено;
АП-Р – автопилот – ракета;
Ккц(р) –
передаточная функция координатора цели;
Коп(р) –
передаточная функция приводов оптического прицела;
Кдсу(р) – передаточная функция дифференцирующего
сглаживающего устройства;
Коп(р), Коп(р),
Кдсу(р) составляют передаточную функцию прицельно-оптического оборудования
и являются задающим воздействием системы контура наведения;
Ккрлу(р) –
передаточная функция командной радиолинии управления;
Ккф(р) –
передаточная функция корректирующего фильтра УВК;
К0(t) –
коэффициент передачи, изменяющийся во времени для стабилизации коэффициента
передачи контура в целом в зависимости от изменения нормального ускорения (перегрузки);
Ккр(р) –
передаточная функция координатора ракеты;
1/rр2 –
передаточная функция кинематического звена при теленаведении, r – текущая дальность
до ракеты;
![]() – баллистические
функции ракеты (моделируется в ЦВС по ЛТХ ракеты в зависимости от температуры и
плотности воздуха);
– баллистические
функции ракеты (моделируется в ЦВС по ЛТХ ракеты в зависимости от температуры и
плотности воздуха);
Ккд(р) –
передаточная функция звена динамики ракеты;
Кба(р) –
коэффициент передачи бортовой аппаратуры (усилительное звено);
9,8 – нормальное ускорение
свободного падения, м/с2;
1/р – передаточная функция интегратора;
εц, βц
– измеренные угол места и азимут цели;
εсгл, βсгл
– сглаженное значение измеренного угла места и азимута цели;
δε, δβ –
разность между εсгл, βсгл и εр,
βр;
εр, βр
– измеренное значение угла места и азимута ракеты;
Еп, Вп+βп
– функции программного вывода;
|
|
Рисунок 2. - Структурная операторная
схема модели контура теленаведения ЗУР
δhε,
δhβ –; линейная ошибка по углу места и азимуту;
lFe, lFb - сигналы на выходе корректирующего фильтра;
lкe, lкb - сигналы компенсации динамической ошибки;
λε,
λβ – суммарные сигналы управления;
К`ε,
К`b – команд управления в
исполнительной системе координат;
К1, К2 – команды
передаваемые на ракету по высоте и курсу;
δ – угол отклонения
рулей;
![]()
![]() – расчетные значения угловых координат, их первой и второй производных;
– расчетные значения угловых координат, их первой и второй производных;
![]() – угловая скорость поворота вектора скорости ракеты;
– угловая скорость поворота вектора скорости ракеты;
Wу – нормальное
ускорение ракеты;
Wу* - нормальное
ускорение с учетом нормального ускорения силы тяжести.
Алгоритм программного вывода
Значения программы обхода
дыма (ПОД) в интервале времени tну £ t £ Tкп
вычисляется по формулам [3]:


где
параметры Ткп и
«а» зависят от температуры
воздуха Т и приведены в таблице. 1.
Таблица 1 - Зависимость параметров Ткп и
«а» от температуры воздуха Т
|
T |
°C |
-50 |
0 |
+50 |
|
Tкп |
cек |
4.8 |
4.5 |
4.1 |
|
а |
|
0.4×К |
0.25×К |
0.25×К |
Значение функции j(х) = -1 соответствует левой ПОД, j(х) = 1
соответствует правой ПОД. Вычисление j(x) прекращается в момент tпуск+0,1
с,
Eo = Bo
= const -
начальные углы ПОД.
Wy лв
- проекция вектора скорости ветра, перпендикулярная линии визирования
цели, положительное направление слева направо;
Wh лв
- проекции вектора скорости ветра на линию визирования цели,
перпендикулярная линии визирования цели, положительное направление вверх;
tну= 0.65, с, (время неуправляемого
полета ЗУР).
Алгоритм компенсатора динамической ошибки наведения
Сигналы компенсации
динамической ошибки вычисляются при
t ³ tну по
формулам [4]:

(1)

При t < tну
![]() .
.
В выражении (1):
Краз – значения
коэффициента усиления по разомкнутому контуру управления ракетой, задаются в
виде таблицы в 25 узловых точках, таблица 2;
![]() -
баллистические характеристики ракеты, задаются в виде таблицы в 25
узловых точках;
-
баллистические характеристики ракеты, задаются в виде таблицы в 25
узловых точках;
![]() -
текущие не сглаженные угол места и азимут цели в сферической стабилизированной
системе координат;
-
текущие не сглаженные угол места и азимут цели в сферической стабилизированной
системе координат;
![]() - угловые
скорости и ускорения кинематической траектории ракеты, вычисляемые по формулам:
- угловые
скорости и ускорения кинематической траектории ракеты, вычисляемые по формулам:
![]()
![]()
![]()
![]()
где ![]() -
угловые скорости и ускорения цели;
-
угловые скорости и ускорения цели;
![]() -
угловые скорости и ускорения программы обхода дыма;
-
угловые скорости и ускорения программы обхода дыма;
![]() -
угловые скорости и ускорения программного отворота от линии визирования.
-
угловые скорости и ускорения программного отворота от линии визирования.
Вычисление команд управления
ЗУР на начальном участке.
Для вертикальной команды начальный участок занимает интервал времени t0 < t £ t¢.
Для горизонтальной команды начальный участок занимает интервал времени
t0 < t £ tну .
Команды управления формируются по зависимостям:

Таблица 2 - Баллистические функции
|
№ |
t (а0) |
Др (а0) |
Vp
(а0) |
|
Wp(
a0) |
fp(
a0) |
Краз |
|
n |
|
сек |
м |
м/с |
м/с2 |
м/с2 |
Гц |
1/с2 |
сек |
- |
|
|
0 |
0 |
0 |
0 |
|
0 |
0 |
Краз0 |
h0 |
n0 |
|
1 |
t1 |
Др1 |
Vp1 |
|
Wp1 |
fp1 |
Краз1 |
h1 |
n1 |
|
2 |
t2 |
Др1 |
Vp2 |
|
Wp2 |
fp2 |
Краз2 |
h2 |
n2 |
|
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
|
… |
… |
… |
… |
… |
… |
… |
… |
… |
… |
|
24 |
t24 |
Др24 |
Vp24 |
|
Wp24 |
fp24 |
1,800 |
h24 |
n1 |
|
25 |
t25 |
Др25 |
Vp25 |
|
Wp25 |
fp25 |
1,800 |
h25 |
n1 |

Вычисление программных команд вывода ракеты на линию
визирования осуществляется по формулам [3]:
где t0
= 0.3с - время начала выдачи программных команд;
t¢ - время появления сигнала захвата ЗУР при t ³ tну ;
t¢ = tну +
0.3с - если сигнал захвата ЗУР не появился;
t -
время полета ракеты;
tну
- время начала управления;
Вычисление суммарных команд
управления ЗУР на участке наведения.
Для вертикальной команды участок наведения занимает интервал времени
с t ³ t¢ до формирования команды
«Сброс» (при пролете ракеты максимальной дальности).
Для горизонтальной команды участок наведения занимает интервал времени
с t ³ tну до
формирования команды «Сброс».
Суммарные команды управления вычисляются по
формулам:
где lFe, lFb - сигналы на выходе корректирующего фильтра;
lкe, lкb -
сигналы компенсации динамической ошибки;
Кe пр, Кb пр - программные команды вывода ракеты на линию
визирования;
Кo
- коэффициент передачи ЦВС.
где Краз
-
коэффициент усиления разомкнутого контура управления, приведенный в таблице
2;
Wp - располагаемое нормальное ускорение ракеты;
dmax - максимальный угол отклонения рулей ракеты;
Кобщ - коэффициент передачи бортовой аппаратуры ракеты.
Wp = np×g ,
где g = 9.81м/c2 - ускорение свободного падения;
np
- располагаемая перегрузка ракеты.
Вычисление команд управления в исполнительной
системе координат осуществляется по формулам:
 .
.
Угол скручивания исполнительной системы координат
относительно измерительной gои вычисляется по формуле [5]:


![]()
![]()
![]()

где ![]() ;
;
Qo , Yo , Qo - значения углов качек платформы, зафиксированные в момент пуска
ЗУР;
![]() - расчётные значения углов наведения пусковой установки по
вертикали и горизонту в сферической стабилизированной системе координат,
зафиксированные в момент пуска ЗУР;
- расчётные значения углов наведения пусковой установки по
вертикали и горизонту в сферической стабилизированной системе координат,
зафиксированные в момент пуска ЗУР;
![]() - угол места пусковой установки в сферической нестабилизированной
системе координат, зафиксированный в момент пуска ЗУР;
- угол места пусковой установки в сферической нестабилизированной
системе координат, зафиксированный в момент пуска ЗУР;
jo, lo - углы вектора скорости ракеты в текущий момент времени;
![]() - текущие не сглаженные угол места и азимут цели в сферической
стабилизированной системе координат.
- текущие не сглаженные угол места и азимут цели в сферической
стабилизированной системе координат.
Команды управления ![]() в исполнительной
системе координат фильтруются режектирующим фильтром [3]:
в исполнительной
системе координат фильтруются режектирующим фильтром [3]:
Ограничение команд управления Кe и Кb выполняется нелинейным
фильтром.
Максимальная величина команды управления.

где t4 и t6 - значения времени четвертой и шестой точек баллистических таблиц
приведенное в таблице 2.
Команды управления сглаживаются фильтром,
передаточная функция которого имеет вид [3]:
Математическая модель
задания входных воздействий ВЦ
Наиболее приемлемым способом создания адекватной
пространственной имитационной модели ВЦ является ее задание путем управления
величиной и направлением ее вектора скорости [5]. В этом случае имеется
возможность имитировать ВЦ, траектория движения которой, наиболее соответствует
реальной траектории цели. Кроме того имеется возможность имитировать цели
летящие с запредельными параметрами, что иногда бывает необходимо при
исследовании динамических систем сопровождения и наведения.
Для определения закона движения ВЦ,
необходимо задать координаты ее центра масс, а также направление и величину ее
вектора скорости как функции времени.
Величину и направление вектора скорости ВЦ, в
горизонтальной и вертикальной плоскостях можно представить в виде:
![]() ;
;
![]() ;
;
![]() ,
,
|
где ai |
– |
начальное
значение соответствующей величины; |
|
bi |
– |
скорость
изменения соответствующей величины; |
|
ci |
– |
ускорение
изменения соответствующей величины; |
|
di |
– |
амплитуда
маневра; |
|
ni |
– |
начальная
фаза маневра; |
|
mi |
– |
частота
маневра. |
Подбирая коэффициенты ai, bi, ci, di, ni, mi, можно
задать траекторию движения цели и учесть ее маневр.
Если известны значения ![]() ,
, ![]() ,
, ![]() ,то координаты ВЦ в прямоугольной системе координат можно получить,
интегрируя при заданных начальных условиях следующие уравнения:
,то координаты ВЦ в прямоугольной системе координат можно получить,
интегрируя при заданных начальных условиях следующие уравнения:
![]() ;
;
![]()
![]() ;
;
![]() .
.
Для задания начальной точки нахождения ВЦ в
пространстве необходимо к соответствующим прямоугольным координатам прибавить
начальные значения этих координат ![]() ,
, ![]() ,
, ![]() :
:
![]() ;
;
![]() ;
;
![]() ,
,
где ![]() – начальный курсовой параметр;
– начальный курсовой параметр;
![]() – начальная высота
ВЦ;
– начальная высота
ВЦ;
![]() – наклонная дальность до ВЦ в
начальный момент времени.
– наклонная дальность до ВЦ в
начальный момент времени.
Величины εц , βц , Dц, легко получить из выражения:
![]() ;
;
![]() ;
;
![]() .
.
При исследовании контуров сопровождения ВЦ,
управления ЗУР в азимутальной плоскости, особый интерес исследователей вызывает
их поведение при сопровождении ВЦ и наведении ЗУР на курсовом параметре, так
как при этом угловые скорость и ускорение линии визирования цели имеют
максимальные значения и соответственно возрастают ошибки наведения. Однако так
как функция ![]() не имеет значения при
не имеет значения при ![]() (Z – множество целых чисел)
[4], то на азимутах близких к курсовому параметру
(Z – множество целых чисел)
[4], то на азимутах близких к курсовому параметру ![]() происходит переброс значения
азимута на
происходит переброс значения
азимута на ![]() .
.
Для того, чтобы устранить этот недостаток
вычисление функции ![]() производится по зависимостям [6]:
производится по зависимостям [6]:
В результате вычисления функции ![]() получается угол, изменяющийся в диапазоне 0
получается угол, изменяющийся в диапазоне 0 ![]() 2π.
2π.
Структурная схема пространственной модели
формирования параметров движения ВЦ представлена на (рис. 3).
Рис. 3. Структурная схема модели формирования
параметров движения цели
Фрагмент компьютерной модели формирования
параметров движения ВЦ (рис. 2), построенная в основном пакете расширения SIMULINK
среды программирования MATLAB.
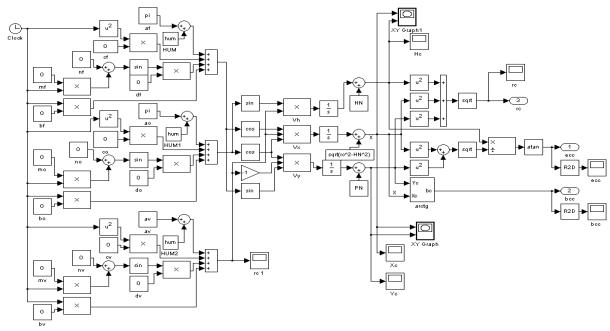
Рис. 2. Вид компьютерной пространственной
имитационной модели
формирования параметров движения ВЦ
Математическая модель задания входных воздействий от трассы
Входными значениями модели
являются скорость движения шасси, длина волны и высота гребней (амплитуда)
неровностей. Непосредственно профиль трассы
по углу галопирования задается по формуле:
![]()
|
где Н |
– |
высота
неровностей, см; |
|
L |
– |
длина
волны неровностей, м; |
|
V |
– |
скорость
движения шасси, км/ч; |
|
t |
– |
текущее
время, с; |
|
0,278 |
– |
коэффициент
учитывающий длину шасси. |
Выходными значениями модели
являются углы курса, продольной и поперечной качек, пройденный путь, а также
прямоугольные координаты центра масс шасси относительно точки начала движения.
Угол поперечной качки θс может задаваться в виде случайной
функции с характеристиками подобными сигналам, полученным в результате обработки
информации циркулирующей в системе измерения углов качек (СИУК). Угол курса Qc задается в виде вектора изменяющегося по закону:
![]() ,
,
|
где aQ |
– |
начальное
значение соответствующей величины; |
|
bQ |
– |
скорость
изменения соответствующей величины; |
|
cQ |
– |
ускорение
изменения соответствующей величины; |
|
dQ |
– |
амплитуда
маневра; |
|
nQ |
– |
начальная
фаза маневра; |
|
mQ |
– |
частота
маневра. |
Подбирая коэффициенты aQ, bQ, cQ, dQ, nQ, mQ, можно задать траекторию движения
шасси и учесть его маневр.
Передаточная функция
типового шасси по углу галопирования Ψ
имеет вид [7]:
![]()
Фрагмент компьютерной имитационной модели
формирования параметров входных воздействий возникающих при движении типового
базового шасси по трассе синусоидального профиля представлена на рисунке 4.
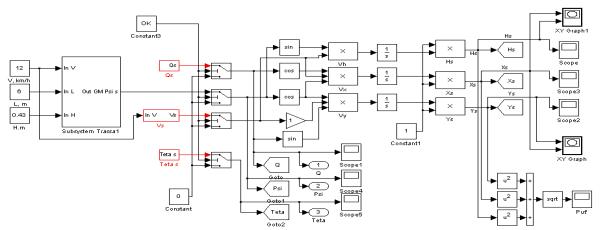
Рисунок 4. - Фрагмент компьютерной имитационной модели типового
базового шасси
Фрагмент компьютерной имитационной модели контура теленаведения,
представлена на рисунке 5.
|
|

Рисунок
5. - Компьютерная имитационная модель контура наведения ЗУР 9М311 М1
Таким образом, построенная компьютерная имитационная
модель позволяет:
имитировать параметры
движения цели с маневром любой степени сложности;
имитировать движение ЗСУ по
трассе синусоидального профиля;
осуществлять пуск ЗУР в
любое время после захвата ВЦ на автосопровождение, как с места, так и в движении;
осуществлять имитацию
наведения ЗУР на ВЦ с отображением угловых и линейных ошибок наведения и
конечного промаха ЗУР.
литература
1.
Желнин
А. А., Бирко Н. И. Повышение боевых возможностей ЗПРК путем реализации стрельбы
телеуправляемой ЗУР В движении // Материалы ХVII военно-научной конференции
– Смоленск: ВА ВПВО ВС РФ, 2010.Ч.2. – 298 с.
2.
Основы
построения самоходных зенитных артиллерийских и зенитных пушечно-ракетных
комплексов: Учебник/ Хуторской И. Н., Жарков С. В., Финогенов С. Н. и др. Смоленск,
ВА ВПВО ВС РФ, 2008. 327 с.
3.
Изделие
1А26. Математическое и программное обеспечение: Техническое описание. Ч. 1.
1980. 117 с.
4.
Кун
А. А. Основы построения зенитных ракетных комплексов. М., Воениздат, 1985.
343 с.
5.
«Динамика
полета зенитных управляемых ракет»/Артамонов В. В., Кириченко В. Д., Комаров Д.
М. и др. Киев., КВАИУ, 1966. 364 с.
6.
Модернизация
зенитного пушечно-ракетного комплекса «Тунгуска-М1»: Отчет о НИР
(промежуточный.)/ВА ПВО СВ РФ; Руководитель работы Н. И. Бирко. Инв.
№ 2/2009–3 . Смоленск, 2009.112 с.
7.
Заключение
по проекту плавности хода гусеничного шасси ГМ–5975.25. 21 НИИИ АТ МО РФ,
2002.
television-guidance imitating model of an antiaircraft
missile
Zhelnin
А. A.
The development of television-guidance
imitating model of antiaircraft missile for the estimation of the effectiveness
of short-range air defense missile systems firing on the move is considered in
the article.
Key words: television-guidance control loop, television-guidance imitating model
of an antiaircraft missile.
Академия войсковой ПВО Вооруженных Сил РФ
им. Маршала Советского
Союза А. М. Василевского, г. Смоленск
Поступила в редакцию 30.03.11.