Математическая морфология.
Электронный математический и
медико-биологический журнал. - Т. 10. -
Вып. 3. - 2011. - URL:
http://www.smolensk.ru/user/sgma/MMORPH/TITL.HTM
http://www.smolensk.ru/user/sgma/MMORPH/N-31-html/TITL-31.htm
http://www.smolensk.ru/user/sgma/MMORPH/N-31-html/cont.htm
УДК
355.469.5/6
ОСОБЕННОСТИ УПРАВЛЕНИЯ ЗЕНИТНОЙ
УПРАВЛЯЕМОЙ РАКЕТОЙ С РАДИОЛОКАЦИОННОЙ ГОЛОВКОЙ
CАМОНАВЕДЕНИЯ ПРИ НАВЕДЕНИИ
НА ГРУППОВУЮ СОСРЕДОТОЧЕННУЮ ЦЕЛЬ
Ó 2011 г. Жарков С. В., Кадученко И. В.
В статье рассмотрены вопросы
применения частотной селекции сигналов от групповой сосредоточенной цели для
повышения точности измерения угловых координат. Предложены пути повышения точности
наведения зенитной управляемой ракеты с радиолокационной головкой самонаведения
на цель, применяющую активную буксируемую радиолокационную ловушку, за счет
использования данных о размерах цели в картинной плоскости и набора
коэффициентов фильтра следящего пеленгатора.
Ключевые слова: групповая сосредоточенная
цель, частотная селекция, угловой шум.
Широкое применение различных
средств воздушного нападения в современных военных конфликтах приводит к возникновению
тактических ситуаций, при которых стрельба зенитными
управляемыми ракетами (ЗУР) ведется по групповым сосредоточенным целям (ГСЦ). Это приводит к существенному
снижению эффективности применения ЗУР с радиолокационной головкой самонаведения
(РГС) в составе войсковых ЗРК средней дальности (СД), за счет негативного
влияния угловых шумов ГСЦ на точность наведения ЗУР. Примером таких ситуаций
являются: стрельба по групповой цели (пара, звено),
стрельба по цели, применяющей радиолокационные ловушки, наведение ЗУР на
конечном этапе (геометрические размеры цели в картинной плоскости значительно
увеличиваются).
Известен
ряд путей снижения влияния угловых шумов на точность измерения угловых
координат в РГС [1], поэтому выбор оптимального пути затруднителен.
Наиболее перспективным
способом повышения точности наведения ЗУР на ГСЦ является частотная селекция
сигналов целей. Существующие доплеровские фильтры полуактивных моноимпульсных
РГС позволяют различать цели, отличающиеся по радиальной скорости на 20 м/c [1]. При
традиционном наведении ЗУР по методу пропорциональной навигации на цели, выполняющие
полет с одинаковыми абсолютными скоростями, такое отличие радиальных скоростей
достигается за счет кинематических различий в относительном движении целей и
ЗУР на очень близком расстоянии.
При наведении ЗУР на пару
целей, летящих с равными скоростями, их радиальные скорости отличаются между
собой на величину, пропорциональную промаху относительно геометрического центра
ГСЦ. Управляя величиной текущего отклонения ЗУР от кинематической траектории,
получаем возможность управлять процессом частотного разрешения сигналов, отраженных
от целей. В частности, при наведении ЗУР по методу пропорциональной навигации отклонение
ЗУР от кинематической траектории стремится к нулю за 2 – 5 с до встречи, что не
позволяет разрешать цели из состава ГСЦ.
Для
разрешения целей предлагается наводить ЗУР на ГСЦ с некоторым, специально
организуемым программируемым промахом до момента разрешения целей, а затем компенсировать
этот промах и исключить обратное уменьшение разности доплеровских частот.
Основным преимуществом
предлагаемого способа являются:
– упорядочивание доплеровских
составляющих сигналов от целей в зависимости от ориентации вектора программируемого промаха относительно центра базы
парной цели, что позволяет уверенно селектировать сигнал от цели из
состава групповой, для которой величина такого промаха минимальна;
– гарантированное
увеличение разности доплеровских частот и тем самым гарантируется сам процесс
разрешения;
– упорядочение сигналов по
частоте позволяет РГС при достаточно широкой полосе пропускания доплеровского
фильтра, сопровождать цели путем частотного разрешения сигналов от целей [2].
Применение активных
буксируемых радиолокационных ловушек (АБРЛ), как средств индивидуальной защиты самолётов тактической авиации ВС зарубежных
государств, усложняет задачу достоверного измерения угловых координат цели.
Описанный выше способ разрешения целей из состава ГСЦ эффективен при применении
АБРЛ AN/ALE-50 (США). В этом случае разрешение достигается за счет
наличия люфта буксируемого объекта, вызываемого набегающим потоком воздуха.
Более
совершенная АБРЛ AN/ALE-55, в которой мощность излучаемого ЛЦ сигнала регулируется
в зависимости от мощности сигнала РЛС и эффективной площади рассеяния самолета,
изменяющихся в зависимости от ракурса, требует иного подхода.
Существует
возможность использования рекурсивных фильтров-экстраполяторов (α – β фильтров) в качестве фильтра
следящего пеленгатора ЗУР, которая предполагает непосредственное определение
коэффициентов фильтра по связанным с дисперсией углового шума размерам целей в
картинной плоскости.
В таком фильтре, выполненном программным способом в специализированном
цифровом вычислителе (СЦВ), осуществляется фильтрация поступающих данных о размере
цели. В случае когда устройство измерения радиального размера цели выдает в СЦВ
сигнал, превышающий некоторое пороговое значение, происходит смена алгоритма сопровождения
цели в соответствии с коэффициентом фильтра. Наличие набора коэффициентов и
возможность смены алгоритма сопровождения позволяет устранить высокого уровня
флюктуаций отраженного сигнала, вызванного угловым шумом объекта «цель-ловушка»
[1].
Процедура
синтеза фильтра следящего пеленгатора сводится к решению следующих задач:
1.
Определение динамической ошибки контура фильтрации.
2.
Расчет дисперсии флюктуационной ошибки экстраполяции.
3. Определение математических соотношений, характеризующих
суммарную ошибку фильтрации.
4.
Нахождение параметров фильтра, обеспечивающих минимум суммарной ошибки
фильтрации.
Для
определения размеров цели в процессе приближения ЗУР к цели выбирают два
последовательно разнесенных интервала времени, таких, чтобы в первом из них при
известных ширине ДНА пеленгатора и дальности до цели коэффициент ее относительной
протяженности по угловым координатам ![]() был близок к нулю, а во втором, после сближения
с целью, – лежал в пределах
был близок к нулю, а во втором, после сближения
с целью, – лежал в пределах ![]() ,
измеряют и запоминают амплитуды откликов на сигналы, принятые для указанных
временных интервалов. Затем вычисляют средние значения амплитуд этих откликов и
их отношение, являющееся признаком протяженности цели (ППЦ). При сравнении
признака с порогом производят распознавание целей, отличающихся поперечными
размерами (способ распознавания классов РЛЦ, отличающихся поперечными размерами).
,
измеряют и запоминают амплитуды откликов на сигналы, принятые для указанных
временных интервалов. Затем вычисляют средние значения амплитуд этих откликов и
их отношение, являющееся признаком протяженности цели (ППЦ). При сравнении
признака с порогом производят распознавание целей, отличающихся поперечными
размерами (способ распознавания классов РЛЦ, отличающихся поперечными размерами).
Вычисление с помощью ППЦ
измеренного значения нормированной разности и сравнение его с расчетным
значением нормированной разности позволяет измерить поперечный размер
наблюдаемой цели (способ измерения поперечного размера РЛЦ). Различная
совокупность операций, выполняемых в способах распознавания и измерения, в качестве
основы использует измеренное значение ППЦ по угловой координате.
При этом нет необходимости
иметь в радиолокационной головке самонаведения (РГСН) антенну, позволяющую формировать
две ДНА. Используется одна ДНА, предназначенная для обнаружения и сопровождения
цели пеленгатором. Регистрация амплитуд откликов цели в два дискретных момента
времени на дальности ![]() (
(![]() , точечная радиолокационная цель) и
, точечная радиолокационная цель) и ![]() (
(![]() , цель групповая сосредоточенная) позволяет сформировать ППЦ
[4].
, цель групповая сосредоточенная) позволяет сформировать ППЦ
[4].
Для
подтверждения результатов исследования было проведено имитационное моделирование
стрельбы по цели (типа F-15) применяющей АБРЛ, летящей
со скоростью Vц1=560 м/с
в точку с координатами:Xтв=15 км;
Yтв=5 км; Zтв=0. На рис.
1. приведены зависимости вероятности Р
попадания ЗУР в круг радиуса 15 м от величины базы между целями (кривая 1 – штатная система, кривая 2 – предлагаемая
система). На рис. 2. приведены интегральные законы распределения промаха при
базе 200 м (кривая 1 – штатная система, кривая 2 – предлагаемая система, Р – вероятность попадания ЗУР в трубку
промаха радиусом r). Математическое моделирование показало, что
вероятность попадания в круг радиуса 15м при базе 100–200 м увеличивается с 0,2
до 0,8, т.е. в 4 раза. Это достигается за счет более раннего разрешения цели из
состава ГСЦ [2].
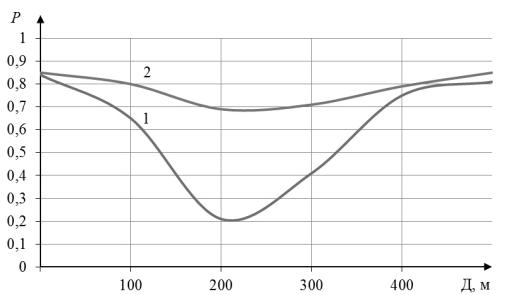
Рис. 1.Вероятность попадания ЗУР в трубку промаха
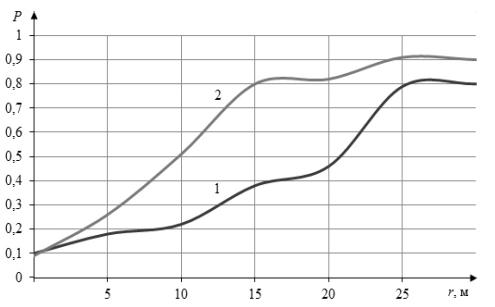
Рис. 2. Интегральные законы распределения промаха
Предложенный способ наведения ЗУР на одну из целей из состава ГСЦ (на самолет, применяющий АБРЛ) отличается использованием данных о размерах цели в картинной плоскости и набора коэффициентов фильтра следящего пеленгатора ЗУР СД и обеспечивает достаточно высокую вероятность разрешения и наведение ЗУР практически с той же точностью, что и на одиночную цель.
литература
1. Жарков С. В. Адаптация
фильтра пеленгатора цели к ее угловым шумам: Дис. … канд. техн. наук. Смоленск,
ВА В ПВО ВС РФ, 1996. 170 с.
2. Акимов
В. Н. Дис. … докт. техн. наук. Смоленск, ВА ВПВО ВС РФ, 2010. 220 с.
3. Хуторской
И. Н., Жарков С. В., Беркс П. П. и др. Система
самонаведения зенитных ракет/Смоленск, 2006. 334 с.
4.
Чертков Е. В. Способы
оценки поперечных размеров целей радиолокационной головкой самонаведения: Дис.
... канд. техн. наук. Смоленск, ВА В ПВО ВС РФ, 2002. 192 с.
FEATURES OF MANAGEMENT OF THE ANTIAIRCRAFT
THE GUIDED MISSILE WITH THE RADAR-TRACKING
HEAD OF HOMING AT PROMPTING ON THE GROUP CONCENTRATED PURPOSE
Ó 2011 г. Zharkov S. V., Kadutchenko
L.V.
In article questions of application of
frequency selection of signals from the group concentrated purpose for increase
of accuracy of measurement of angular coordinates are considered. Ways of
increase of accuracy of prompting of the antiaircraft guided missile with a
radar-tracking head of homing on the purpose applying an active towed
radar-tracking trap, at the expense of use of the data about the sizes of the
purpose in a picture plane and a set of factors of the filter of a watching
direction finder are offered.
Keywords: the group concentrated purpose, frequency
selection, angular noise.
Военная академия войсковой ПВО Вооруженных
Сил Российской Федерации
имени Маршала Советского Союза А.М. Василевского
(ВА ВПВО ВС РФ)
Поступила в редакцию 20.09.2011.