Математическая морфология.
Электронный математический и
медико-биологический журнал. - Т. 12. -
Вып. 1. - 2013. - URL:
http://www.smolensk.ru/user/sgma/MMORPH/TITL.HTM
http://www.smolensk.ru/user/sgma/MMORPH/N-37-html/TITL-37.htm
УДК 358.116
Способ косвенной стабилизации по угловым
скоростям и ускорениям качки и раздельной обработкой полезных сигналов
Ó
2013 г. Желнин А. А.
(zhelnin.doc)
В данной работе изложен способ косвенной
стабилизации по угловым скоростям и ускорениям качки и раздельной обработки
полезных сигналов. Предлагаемый способ основан на преобразовании углов качек
самоходного шасси в угловые скорости и ускорения сигналов косвенной
стабилизации, разделения смеси сигналов наведения и достабилизации, их оптимальной
обработки корректирующими звеньями и последующего суммирования для управления
скоростным контуром привода наведения. Способ позволяет учитывать характер
изменения углов качек и минимизировать влияние движения ЗСУ на качество сопровождения
цели оптико-электронной системой сопровождения.
Ключевые слова: управления скоростным контуром
привода наведения.
Анализ результатов проведенных исследований в
направлении реализации стрельбы ЗУР с теленаведением ЗСУ ЗПРК в движении
показывает, что качки самохода оказывают негативное влияние как на точность
определения координат цели и ракеты, так и на алгоритм вычисления динамической
ошибки наведения ЗУР [1].
На рисунке 1 представлена
единая комплексная структура управления приводами ОП. На рисунке обозначено:
устройства:
СИУК – система измерения углов качек;
СК ОП – скоростной контур оптического прицела;
ТВ канал – телевизионный канал;
ТПВ канал – тепловизионный канал;
ТТА – телетеплоавтомат сопровождения цели;
ФНЧ – фильтр низких частот;
сигналы:
Q, ψ, Θ – углы курса,
галлопирования и потаптывания;
 ,
,  ,
,  – скорости
углов качек;
– скорости
углов качек;
 ,
,  ,
,  ,
,  – угловые
скорости и ускорения стабилизации линии визирования цели;
– угловые
скорости и ускорения стабилизации линии визирования цели;
 – компенсирующий сигнал качки в
вертикальной плоскости;
– компенсирующий сигнал качки в
вертикальной плоскости;
 – компенсирующий сигнал
наведения и стабилизации в вертикальной плоскости;
– компенсирующий сигнал
наведения и стабилизации в вертикальной плоскости;
 – суммарный комплексный сигнал
наведения и стабилизации в вертикальной плоскости;
– суммарный комплексный сигнал
наведения и стабилизации в вертикальной плоскости;
 – суммарный комплексный сигнал
наведения и стабилизации в горизонтальной плоскости;
– суммарный комплексный сигнал
наведения и стабилизации в горизонтальной плоскости;
 – компенсирующий сигнал
скорости движения башни;
– компенсирующий сигнал
скорости движения башни;
 ,
, – полные сигналы наведения и стабилизации;
– полные сигналы наведения и стабилизации;
Используя имитационную
модель привода наведения ОП [2, 3] по каналу ε построенную в SIMULINK,
адекватность которой подтверждается сходимостью динамических характеристик с
реальным приводом ОП необходимо исследовать возможность стабилизации ОП используя
угловые скорости и ускорения стабилизации линии визирования цели  ,
,  ,
,  ,
,  , и оценить ее точность.
, и оценить ее точность.
С этой целью необходимо
построить зависимость оптимальных коэффициентов усиления по угловой скорости и
ускорению от частоты входного воздействия в исследуемой полосе частот.
Для определения оптимальных
коэффициентов усиления сигналов угловых скоростей и ускорений К1 и К2 соответственно,
используем модель привода наведения ОП по каналу ε, модель СИУК и блок вычисления угловых скоростей
и ускорений стабилизации линии визирования рисунок 2.
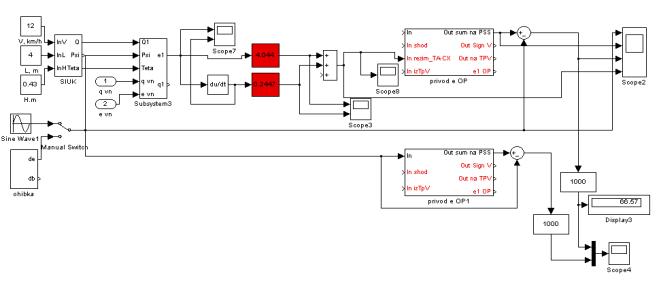
Рис. 2. Модель для определения оптимальных
коэффициентов усиления сигналов угловых скоростей и ускорений линии визирования.
Структурная схема фильтра
для вычисления скоростей изменения качек Q , Y , Q показана на рисунке 3.
Рис. 3 Структурная схема фильтра для вычисления
скоростей изменения качек Q , Y , Q.
Где T = 0.04c, x = 0.6
Вычисление
угловых скоростей качек линии визирования выполняется по формулам [2, 3]:




На вход ψ, блока вычисления угловых скоростей и
ускорений стабилизации линии визирования (рис. 1) будем последовательно
подавать синусоидальный сигнал с частотами от 0.5 до 21 рад/с, что
соответствует спектру входного воздействия и амплитудой 0,055 рад, что соответствует
колебаниям корпуса при движении ГМ по трассе синусоидального профиля с высотой
неровностей 50 см, длиной волны неровностей 7 м, скоростью движения шасси 12
км/ч. Данные условия движения шасси
являются наиболее характерными при движении по грунтовым дорогам [3].
Подбор коэффициентов К1 и К2
будем осуществлять по минимальной ошибке отработки привода, сравнивая поданный
на блок вычисления угловых скоростей и ускорений сигнал с отработанным угловым
положением привода ε ОП.
Учитывая, что в приводе ОП
имеется реверсивный электродвигатель, который обуславливает возникновение
нелинейности типа «зона нечувствительности», вид сигнала ошибки при синусоидальном
воздействии и оптимально подобранных коэффициентах К1 и К2 должен быть подобен
меандру (рисунок 4).

Рис. 4 Вид сигнала ошибки привода ε ОП при отработке синусоидального воздействия.
Требуемый вид функций К1 и К2 в зависимости от
частоты входного воздействия представлен на рисунке 5.
Рис. 5 Значение коэффициентов усиления К1 и К2 (по
угловой скорости и ускорению) в зависимости от частоты входного воздействия.
Представленные на рисунке 5 графики имеют вид АЧХ
ФНЧ, поэтому задача выработки коэффициентов усиления стабилизации линии
визирования, может быть решена построением адаптивных ФНЧ.
Достоинством предлагаемого
подхода является то, что способ учитывает характер изменения углов качек, что
позволяет минимизировать влияние движения ЗСУ на качество сопровождения цели
оптико-электронной системой сопровождения цели. По каналам наведения и достабилизации
система обладает астатизмом второго порядка, что обеспечивает высокую точность
сопровождения цели. предлагаемый способ стабилизации разработан для ЗСУ 2С6М1 и
не имеет аналогов в образцах вооружения войсковой ПВО.
Литература
1.
Желнин
А. А., Бирко Н. И. Повышение боевых возможностей ЗПРК путем реализации стрельбы
телеуправляемой ЗУР В движении // Материалы ХVII военно-научной конференции
– Смоленск: ВА ВПВО ВС РФ, 2010.Ч.2. – 298 с.
2.
Изделие
1А26. Математическое и программное обеспечение: Техническое описание. Ч. 1.
1980. 117 с.
3.
Модернизация
зенитного пушечно-ракетного комплекса «Тунгуска-М1»: Отчет о НИР
(промежуточный.)/ВА ПВО СВ РФ; Руководитель работы Н. И. Бирко. Инв.
№ 2/2009–3 . Смоленск, 2009.112 с.
WAY OF
INDIRECT STABILIZATION ON ANGULAR SPEEDS AND ACCELERATIONS OF ROLLING AND SEPARATE
PROCESSING OF USEFUL SIGNALS
Zhelnin A. A.
In this work the way of indirect stabilization
on angular speeds and accelerations of rolling and separate processing of
useful signals is stated. The offered way is based on transformation of corners
of rolling of the self-propelled chassis to angular speeds and accelerations of
signals of indirect stabilization, divisions of a mix of signals of prompting
and a dostabilizatsiya, their optimum processing by correcting links and the
subsequent summation for management of a high-speed contour of a drive of
prompting. The way allows to consider nature of change of corners of rolling
and to minimize influence of movement ZSU on quality of support of the purpose
optiko-electronic system of support.
Key words: management of a high-speed contour of a drive.
Автор:
Желнин Алексей
Аркадьевич, 1976 г. р., преподаватель кафедры Военной академии войсковой ПВО
Вооруженных Сил РФ им. Маршала Советского Союза А. М. Василевского, г. Смоленск.
Область научных
интересов:
системы стабилизации
координаторов и оптимальная обработка сигналов.
Раздел журнала:
«Радиотехника»
Рабочий телефон: (4812)
29-98-37
Домашний телефон: +79107694452
E-mail: zelnin76@mail.ru
Академия
войсковой ПВО Вооруженных Сил РФ
им.
Маршала Советского Союза А.М. Василевского,
г. Смоленск
Поступила в редакцию 29.01.2013.