Электронный математический и
медико-биологический журнал. - Т. 12. -
Вып. 3. - 2013. - URL:
http://www.smolensk.ru/user/sgma/MMORPH/TITL.HTM
http://www.smolensk.ru/user/sgma/MMORPH/N-39-html/TITL-39.htm
http://www.smolensk.ru/user/sgma/MMORPH/N-39-html/cont.htm
УДК
621.314.58
ПРОБЛЕМЫ СОЗДАНИЯ SPICE-МОДЕЛЕЙ КОНТРОЛЛЕРОВ ИМПУЛЬСНЫХ РЕГУЛЯТОРОВ
Ó
2013 г. Амелин С. А., Амелина М. А.
В работе изложены основные
проблемы, возникающие при создании математических моделей контроллеров импульсных
регуляторов тока и напряжения, предназначенных для использования в программах
схемотехнического анализа, а также сформулированы основные принципы, используя
которые можно создавать быстрые и точные модели этого класса электронных
устройств. Для иллюстрации изложенных принципов приведен пример построения
модели контроллера TL494.
Ключевые слова: Spice-модели, ШИМ-контроллеры, импульсные источники питания, проблемы
сходимости, оптимизация библиотек функциональных узлов.
Математическое моделирование с использованием
специализированных программ схемотехнического анализа (PSpice, Orcad,
Micro-Сap, Multisim и др.) является типовым этапом проектирования современных электронных
устройств [1]. Однако, моделирование устройств преобразовательной техники (в
частности, импульсных источников электропитания) затруднено тем, что для
существенной части специализированных контроллеров (основы построения
импульсных источников электропитания) математических моделей пока не
существует. Кроме того, существующие модели контроллеров, размещенные на сайтах
их производителей, часто являются зашифрованными, т.е. пользователь не может
увидеть их внутреннюю структуру и оценить степень их адекватности.К тому же
подобные модели, как правило, разрабатываются специально под конкретную
программу схемотехнического анализа и не совместимы с остальными программами.
Поэтому создание моделей контроллеров широтно-импульсных модуляторов
(ШИМ-контроллеров) и частотно-импульных модуляторов (ЧИМ-контроллеров), которые
используют язык описания электронных схем PSpice, что делает их совместимыми с
существенной частью программ схемотехнического анализа,представляет как
практический, так и теоретический интерес.
На данный
момент при моделировании импульсных источников питания часто пользуются
обобщенными моделями специализированных контроллеров, например, моделями
Кристофа Бассо [2]. Но такие модели, как правило, не учитывают особенности
реализации конкретного ШИМ-контроллера и реализуют не все его функции, а только
основные.
Существенно
более точную модель можно построить по функциональной схеме специализированного
контроллера и его фирменному описанию. Такую модель целесообразно разрабатывать
в виде схемной макромодели (например, макромодели программыMicro-Cap). Это
предоставляет возможность наглядно представить ее внутреннюю структуру, легко
вносить коррективы и упростить процесс отладки модели. В то же время конечный результат
встроенными средствами программы легко конвертировать в Spice-описание
(текстовый Spice-файл со стандартной структурой), что позволяет использовать
такую модель не только в программе Micro-Cap, но и в любых других программах
схемотехнического анализа, использующих язык Spice, точнее, его диалекты
PSpice, HSpiceи Spice3 [3].
Общий подход к
созданию модели ШИМ-контроллера
ШИМ-контроллеры
представляют собой достаточно сложные устройства и их моделирование сопряжено с
определенными трудностями. Особенно если учесть, что они работают не сами по
себе, а в составе еще более сложного устройства — импульсного источника
питания. Поэтому модель ШИМ-контроллера должна быть максимально простой, иначе
моделирование устройства в целом может оказаться невыполнимой задачей.
В принципе,
разработка модели, которая реализовывала бы необходимые функции и отвечала
внешним параметрам, которые регламентированы производителем, не вызывает
больших затруднений. Сложность заключается именно в обеспечении заданной
точности при приемлемой скорости расчетов. Решение такой задачи с
использованием стандартных компонентов из библиотек программ схемотехнического
анализа, как правило, не приносит желаемого результата. Такая модель
ШИМ-контроллера оказывается бесполезной с практической точки зрения, поскольку
построение схемной модели сложного источника питания с ее использованием оказывается
невозможным – вычислительная сложность конечной системы уравнений оказывается
выше вычислительных возможностей современных персональных компьютеров.
Это связано с
тем, что ШИМ-контроллер является сложным аналого-цифровым устройством, в
котором протекают как быстрые процессы коммутации и обработки логических
сигналов, так и сравнительно медленные процессы в системе обратных связей. И
этот уже сам по себе сложный контроллер входит в состав преобразовательного
устройства, где диапазон постоянных времени процессов еще больше (от десятков
наносекунд во время коммутационных процессов до десятков секунд установления
режимов реактивных компонентов.). Расчет системы, в которой постоянные времени,
токи и напряжения отличаются на 6–9 порядков, представляет очень сложную вычислительную
задачу даже для современной компьютерной техники. Кроме того, в такой сложной
системе высока вероятность расхождения численных методов расчетов. Это приводит
либо к остановке процесса моделирования, либо к неверному результату моделирования(что
еще хуже). Поэтому при проектировании математической модели ШИМ-контроллера
необходимо не только обеспечивать адекватность модели и ее реального прототипа,
но и стараться получить хорошую сходимость вычислительных алгоритмов при
использовании такой модели.
Средства для
создания модели ШИМ-контроллера
Очевидно, что
для обеспечения адекватности модели ШИМ-контроллера необходимо реализовывать ее
внутреннюю структуру в соответствие с функциональной схемой реальной
микросхемы. Однако в процессе построения модели необходима оптимизация как
внутренней структуры, так и параметров самих компонентов (функциональных),
которые реализуют эту внутреннюю структуру. Причем построение оптимальной
модели ШИМ-контроллера необходимо начинать с создания оптимальных моделей компонентов
и узлов, его составляющих. Под оптимальными в данном случае понимаются
моделивыполняющие свои функции с достаточной точностью, но требующие для
расчета минимальное время и обеспечивающие высокую сходимость вычислительных
алгоритмов.
Функциональные
схемы ШИМ-контроллеров и ЧИМ-контроллеровстроятся из сравнительно небольшого
числа функциональных блоков:
·
тактовые генераторы;
·
усилители рассогласования
(усилители-ограничители);
·
компараторы;
·
RS-триггеры;
·
D-триггеры;
·
Т-триггеры;
·
логические элементы;
·
источники тока (управляемые и
неуправляемые);
·
источники
напряжения(управляемые и неуправляемые
·
буферные каскады (усилители
мощности);
·
ключи.
Ограниченность
типового набора функциональных блоков позволяет провести их оптимизацию,
сформировать библиотеку моделей функциональных блоков и затем использовать эту
библиотеку для построения моделей ШИМ-контроллеров.
Согласно
вышесказанному, с помощью методики, направленной на упрощение системы в целом с
сохранением заданной точности вычислений, а также учитывающей особенности
численных методов для улучшения сходимости, была создана библиотека моделей
функциональных блоков для ШИМ-контроллеров в программе схемотехнического анализа
Micro-Cap [4]. Используемые в различных комбинациях, эти блоки составляют базис
для построения практически любого ШИМ-контроллера.Однако даже при использовании
оптимизированных моделей создание быстрых и точных моделей ШИМ-контроллеров
представляет собой очень непростую задачу. Поэтому целесообразно рассмотреть весь
процесс создания такой модели на каком-то конкретном примере.
Рассмотрим
построение макромодели ШИМ-контроллера на примере широко распространенной
микросхемы TL494, на основе которой были выполнены источники питания
большинства компьютеров стандарта AT.
Краткое
описание ШИМ-контроллера TL494
Основные
характеристики:
·
полный набор функций
ШИМ-управления;
·
выходной втекающий или
вытекающий ток каждого выхода …200мА;
·
возможна работа в двухтактном
или однотактном режиме;
·
встроенная схема подавления сдвоенных
импульсов;
·
широкий диапазон
регулирования;
·
выходное опорное
напряжение…………………….………….5В +-05%;
·
просто организуемая
синхронизация
Предельные
значения параметров:
·
Напряжение
питания…………………………….…………………….41В;
·
Входное напряжение
усилителя………………………….…..(Vcc+0.3)В;
·
Выходное напряжение
коллектора………………………………...…41В;
·
Выходной ток
коллектора…………………………………………250мА;
·
Общая мощность рассеивания в
непрерывном режиме…………….1Вт.
Микросхемы
TL494 специально спроектированы для использования в импульсных источниках
питания. Структура этой микросхемы представлена на рис. 1.
ШИМ-контроллер
содержит два усилителя рассогласования, встроенный регулируемый генератор,
компаратор регулировки мертвого времени, триггер управления, прецизионный
источник опорного напряжения на 5 В и схему управления выходным каскадом.
Усилитель ошибки работает с синфазным напряжением в диапазоне от
–0,3…(Vcc–2) В. Компаратор регулировки мертвого времени имеет постоянное
смещение, которое ограничивает минимальную длительность мертвого времени
величиной порядка 5% от периода коммутации.
Рисунок
1 – Структурная схема ШИМ-контроллера TL494
Допускается
синхронизация встроенного генератора, при помощи подключения вывода Rt к выходу
опорного напряжения и подачи входного пилообразного напряжения на вывод Сt, что
используется при синхронной работе нескольких схем источников питания.
Независимые
выходные формирователи на транзисторах обеспечивают возможность работы
выходного каскада по схеме с общим эмиттером либо по схеме эмиттерного повторителя.
Выходной каскад микросхем TL494 работает в однотактном или двухтактном режиме с
возможностью выбора режима с помощью специального входа. Встроенная схема контролирует
каждый выход и запрещает выдачу сдвоенного импульса в двухтактном режиме.
Алгоритм работы
ШИМ-контроллера следующий. Генератор в соответствии с параметрами времязадающей
RC-цепи генерирует пилообразное напряжение амплитудой 3 В. Это напряжение
сравнивается с опорным напряжениемкомпараторомконтроля «мертвого времени» (см.
рис. 1). При этом формируется максимально возможная длительность выходного
импульса, чем ограничивается коэффициент заполнения. Т.е. на выходе компаратора
формируются прямоугольные импульсы с периодом тактового генератора и небольшой
паузой («мертвым временем») межу ними.
Пилообразное
напряжение с задающего генератора поступает также на компаратор ШИМ, где
сравнивается с сигналом рассогласования, поступающего с обоих усилителейрассогласования.
В результате формируются импульсы, определяющие коэффициент заполнения.
Ограничение максимальной длительности импульсов (максимального коэффициента
заполнения) осуществляется операцией «логического И» (на рис. 1 элементом «ИЛИ»
при активном низком уровне).
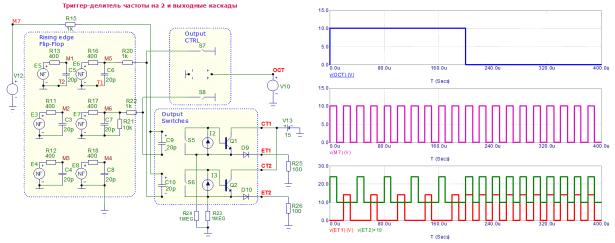
Для обеспечения
работы ШИМ в двухтактном режиме, когда импульсы поочередно появляются на обоих
входах, счетный триггер делит частоту поступающих импульсов на 2 и с помощью
последующего блока логических элементов формирует подачу сигнала поочередно на
базы транзисторов Q1 и Q2. Этот же логический блок формирует переключение в
однотактный режим по сигналу OTC (OUTPUT CTRL – активный низкий уровень). В
этом режиме сигнал на обоих выходах контроллера появляется одновременно и с
полной тактовой частотой.
Источник
опорного напряжения формирует опорное напряжение 5 В. Этот узел также
блокирует работу ШИМ-контроллера при напряжении питания ниже 6,4 В.
Построение
моделей функциональных узлов TL494
Построение
модели ШИМ-контроллера оказывается гораздо более трудной задачей, чем может
показаться на первый взгляд. Дело в том, что при создании модели мало просто
сформировать приведенный выше алгоритм работы. Необходимо обеспечить работоспособность
созданной схемы во всех режимах, в которых используется реальная микросхема, и
сделать это с минимальными вычислительными затратами. Ведь модель будет работать
в сложных замкнутых системах с периодической коммутацией, которые сами по себе
сложны в моделировании и расчеты занимают достаточно много времени. Кроме того,
модель должна обеспечивать сохранение работоспособности при достаточно большом
диапазоне шага расчета и обеспечивать хорошую сходимость алгоритмов
вычислительных процессов. Иначе неизбежна остановка выполнения расчета и появление
сообщения об ошибке расчета («матрица сингулярна»). Поэтому при создании модели
ШИМ-контроллера использование в качестве функциональных блоков моделей реальных
компонентов (компараторов, операционных усилителей) неоправданно. Нужно
использовать упрощенные модели, работающие на функциональном уровне, но
моделирующие принципиально важные параметры реальных функциональных блоков
микросхемы.
Основными
функциональными блоками ШИМ-контроллераTL494 являются задающий генератор, усилитель рассогласования, компаратор,
логические микросхемы, блок контроля напряжения питания и выходной каскад.
Рассмотрим
реализацию моделей каждого из этих блоков.
Генератор
В микросхеме
TL494 генератор вырабатывает на времязадающем конденсаторе Сt (вывод 5)
пилообразное напряжение 0…+3,0 В для TL494 TexasInstruments и
0...+2.8 В для TL494 Motorola. Соответственно для TI F=1,0/(RtCt), для
Motorola F=1,1/(RtCt).
Допустимые
рабочие частоты: от 1 до 300 кГц. При этом рекомендованный диапазон
времязадающего сопротивления Rt=1...500 кОм, а времязадающего конденсатора
Ct=470 пФ...10 мкФ. Для дистанционного выключения генератора можно
внешним ключом замкнуть вход Rt (6) на выход источника опорного напряжения или
замкнуть Ct на землю.
Построение
модели генератора пилообразного напряжения быстро и надежно работающего с таким
диапазоном Ct и Rt – непростая задача. Самый простой вариант – сделать модель
генератора, состоящую из управляемого источника тока (управляется Rt) и ключа с
гистерезисом, который переключается при порогах -0,01В и 2,97В (рис. 2).
Рисунок.
2 – Генератор пилообразного напряжения (1-ый этап)
Отрицательное
смещение V1=0,2 улучшает стабильность работы ключа и компенсирует падение
напряжения на резисторе R5, вызванное протеканием тока источника G3 при
замкнутом состоянии ключа S1.
При построении
модели генератора следует помнить про ограничение максимального шага расчета.
Иначе неточно будут определяться пороги переключения (особенно это касается
быстрого заднего фронта). Задний фронт (разряд) времязадающего конденсатора –
самый быстрый в схеме процесс, который необходимо контролировать (сравнивать с
уровнем нуля). Именно он будет определять максимально возможный шаг расчета,
при котором сохраняется работоспособность модели.
На максимальной
частоте работы TL494 (300 кГц) время заднего фонта должно быть около
150 нс (5% длительности импульса). Такой задний фронт получается при
сопротивлении разрядного ключа R5=35 Ом и емкости времязадающего конденсатора
Ct=1,5 нФ (рис. 3).
Рисунок
3 – Форма импульсов генератора при малом шаге расчета MaximumTimestep
Очевидно, что
шаг расчета для получения такого импульса должен быть меньше 150 нс, иначе
на задний фронт не попадет ни одна расчетная точка и переключение будет
происходить неправильно. Поскольку шаг расчета программой выбирается
автоматически, чтобы обеспечить работу модели ШИМ-контроллера с таким
генератором необходимо ограничить максимальный шаг расчетов величиной
10-20 нс. При этом на крутом заднем фронте еще имеется несколько расчетных
точек и ключ переключается правильно (рис. 4).
Рисунок.
4 – Расположение расчетных точек на графике напряжения генератора при ограничениизначении
MaximumTimestep на уровне 10 нс
Однако для
некоторых расчетов ограничение шага в 10-20 нс сильно увеличивает время
вычислений. Желательно, чтобы генератор мог стабильно работать и при менее жестком
ограничении шага до 100-200 нс, что значительно (в 5-10 раз) ускорит моделирование.
Если в
приведенной выше схеме установить ограничение максимального шага расчета
200 нс, то генератор начнет работать неправильно, поскольку неверно будут
определяться порог переключения (нулевой уровень). В результате напряжение на
конденсаторе зайдет в отрицательную область (рис. 5).
Рисунок
5 – Напряжение и расчетные точки
генератора при слишком большом шаге расчета MaximumTimestep
На задний фронт
при таком ограничении шага попала всего лишь одна расчетная точка (напряжение в
ней около 1 В), а переключение ключа произошло в следующей расчетной точке
после достижения нуля. Но напряжение в этой точке уже сильно отличается от нуля
(-1 В). Фактически времязадающий конденсатор будет перезаряжаться не от 0
до 3 В, а от -1 В до 3 В. Поэтому частота генератора станет
меньше. Кроме того, эта частота будет нестабильна.
Для того, чтобы
обеспечить стабильную работу такого генератора при ограничении шага в
200 нс необходимо увеличить время заднего фронта (время разряда). Для
этого сопротивление резистора R5 нужно увеличить до 100 Ом (рис. 6).
Рисунок
6 – Напряжение и расчетные точки генератора с замедленным фронтом выключения
Генератор
теперь будет работать стабильно, но возрастет «мертвое время» (уменьшится
предельный коэффициент заполнения импульсов) за счет пологого перегиба вблизи
нуля («мертвое время» отсчитывается по уровню 0,12 В). Кроме того, при
больших значениях времязадающей емкости Ct получается нереально большое время
заднего фронта пилообразных импульсов и частота генератора будет отличаться от
расчетной.
Получается, что
не существует универсального значения R5, обеспечивающего адекватное поведение
модели в широком диапазоне изменений Ct при сохранении высокой скорости
расчета. Необходимо либо искать компромисс и задавать R5 приемлемым для
большинства случаев, либо менять его в зависимости от допустимого ограничения
шага расчета и значения емкости Ct.
Очевидно, что
самый приемлемый вариант – задать в модели Ct компромиссное значение Ct (по
умолчанию), но предусмотреть возможность его корректировки. При использовании
такой модели необходимо помнить о соотношениях:
- максимально
возможный шаг — Ct*R5 (примерно);
- задний фронт
напряжения задающего генератора – 3*Ct*R5 (примерно)
При значении R5
по умолчанию 50 Ом на максимальной частоте 300 кГц (Ct=1 нФ,
Rt=3 кОм) максимальный шаг расчета 50-100 нс, а время заднего фронта
– 170 нс.
Ограничение на
использование времязадающих компонентов генератора: Rt от 2 кОм до
100 кОм, Ct от 500 пФ до 10 мкФ. При малых и больших значениях
емкости могут потребоваться коррекция разрядного резистора R5 и изменение предельного
шага расчета (чем меньше емкость, тем меньше шаг).
Если по
каким-то причинам реализованная модель генератора не устраивает, то вместо
времязадающего конденсатора Ct можно подключить генератор пилообразного напряжения,
встроенный в Micro-Cap. Тогда отпадают все проблемы с обеспечением сходимости
модели при большом шаге расчета.
Однако и первый
и второй вариант построения модели не вполне адекватен ее реальному прототипу и
накладывает ограничения на область применимости модели. Желательно иметь
модель, свободную от этих ограничений, т.е. нормально функционирующую при всех
допустимых комбинация значений Rt и Ct.
Чтобы обойти
ограничения, связанные с алгоритмом автоматического выбора шага, необходимо
создать условия, при которых шаг расчета на крутом заднем фронте уменьшается, а
на переднем пологом – остается достаточно большим. Этого можно добиться используя
резистор с нелинейным сопротивлением в цепи заряда-разряда конденсатора Ct,
задав, например, экспоненциальную зависимость сопротивления разрядной цепи R5
от напряжения на разряжаемом конденсаторе Ct (рис. 7).
Рисунок
7 – Генератор пилообразного напряжения с нелинейным элементом
При этом
сопротивление разрядного ключа экспоненциально изменяется от 10,55 Ом в начале разряда до примерно 1000 Ом в конце. В этом случае необходимо
изменить величину компенсирующей ЭДС источника V1 разрядной цепи на значение
1кОм*3мА=3 В. При таком решении увеличивается нелинейность временной
зависимости напряжения на Ct на этапе его разряда, что вынуждает алгоритм
расчета Micro-Capк автоматическому уменьшению шага расчета. А это в свою
очередь создает возможность точного расчета на данном участке при задании
практически любого значения MaximumTimestep(рис. 8). Автоматическое увеличение
расчетных точек приводит к более точному определению момента срабатывания ключа
S1 (его замыкания), в результате частота тактового генератора по результатам
расчета получается стабильной и примерно равной значению, полученному по
расчетной формуле.
Рисунок
8 – Расчетные точки при MaximumTimestep=200n
и нелинейном разрядном резисторе
Такой принцип
построения задающего генератора можно использовать не только в модели
контроллера TL494, но и в
моделях любых других ШИМ-контроллеров.
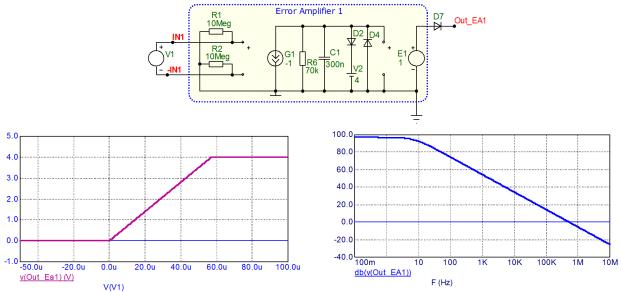
Усилители
рассогласования
В микросхеме
TL494 усилители рассогласования это операционные усилители с Кu=70…95 дБ
по постоянному напряжению (60 дБ для ранних серий), Кu=1 на частоте
350-800 кГц (рис. 9). Входные цепи собраны на pnp-транзисторах, поэтому
входной ток (до 1,0 мкА) вытекает из ИС а не втекает в нее. Ток достаточно
большой для ОУ, напряжение смещения тоже (до 10 мВ) поэтому следует
избегать высокоомных резисторов в управляющих цепях (не более 100 кОм).
Рисунок
9 – Передаточная характеристика и АЧХ усилителей рассогласования
Выходы двух
усилителей объединены диодным ИЛИ. Тот усилитель, на выходе которого большее
напряжение, перехватывает управление выходной логической схемой. При этом
выходной сигнал доступен не отдельно от каждого усилителя рассогласования, а
только с выхода диодного ИЛИ (он же вход компаратора ошибки).
Поскольку
усилители рассогласования имеют вполне определенную и известную передаточную
характеристику, то самый простой вариант создания модели – использование
табличного источника. АЧХ усилителя легко сформировать RC-цепями (рис. 10).

Рисунок
10. Схема, передаточная характеристика и АЧХ модели усилителя
рассогласования (1-ый этап)
Табличный
источник E1 задан следующей передаточной характеристикой — (0,0) (0.4m,4)
(20m,5). Т.е. минимальное выходное напряжение – 0, максимальное – 5 В. В
диапазоне от 0 до 0,4 мВ коэффициент усиления 10 000 (80 дБ),
потом он падает до 250, а затем выходное напряжение ограничивается на уровне
5 В.
Такая модель
очень простая, однако она дает неправдоподобно малую скорость нарастания
выходного напряжения. В результате ШИМ-контроллер с такой моделью ведет себя
неадекватно прототипу (в первую очередь это касается устойчивости системы автоматического
регулирования). Поэтому необходимо усложнять модель и строить усилитель
рассогласования на основе классической структуры макромодели операционного
усилителя (рис. 11).
Рисунок
11 ––Схема, передаточная характеристика и АЧХ модели усилителя рассогласования
(2-ой этап)
Такая модель
обеспечивает адекватную работу контроллера как при малых, так и при больших
сигналах. Т.е. с прототипом совпадают как частотная, так и переходная характеристика.
Однако такая модель все-таки много проще стандартной модели операционного
усилителя, что повышает конечную скорость расчетов с использованием такой
модели.
Компаратор
К модели
компаратора предъявляется только одно требование: она должна обеспечивать
переключение компаратора из одного состояние в другое при заданном уровне. Поэтому
можно построить самый простой вариант с использованием ключа, управляемого
напряжением, который замыкается при напряжении между управляющими узлами менее
0,01 В. Два последовательно включенных компаратора в структуре контроллера
TL494 организуютширотно-импульсный
модуляторс ограничением максимального коэффициента заполнения импульсов (рис.
12).
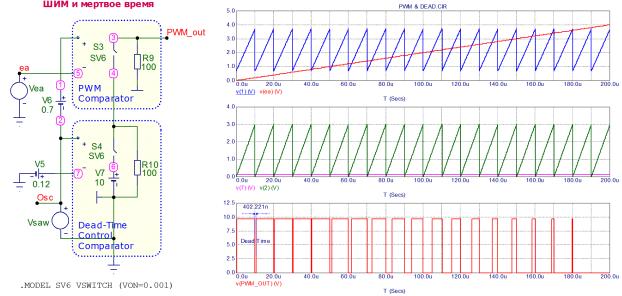
Рисунок
12 –– Модель блока компараторов
Последовательное
включение ключей реализует функцию «логическое И»: сигнал появляется на выходе,
только когда замкнуты оба ключа. Нижний компаратор формирует максимальное
заполнение, верхний – собственно организует ШИМ, сравнивая напряжение пилы с
сигналом усилителя рассогласования. При увеличении напряжения на входе DTC
увеличивается «мертвое время» (уменьшается предельный коэффициент заполнения).
Триггер и
логическая схема управления выходами
В микросхеме
TL494 при напряжении пилы на генераторе большем, чем на управляющем входе DT, и
большем чем на любом из усилителей ошибки (с учетом встроенных порогов и
смещений) — разрешается выходной сигнал схемы. При сбросе генератора из
максимума в ноль — выходы отключаются. Триггер с парафазным выходом делит
частоту на два. При логическом 0 на входе 13 (режим выхода) фазы триггера
объединяются по ИЛИ и подаются одновременно на оба выхода, при логической 1 —
подаются попеременно на каждый из выходов.
Деление частоты
можно организовать при помощи макромодели D-триггера TOGGLE, разработанного
Кристофом Бассо для создания обобщенных моделей ШИМ-контроллеров. Эта
макромодель содержит функциональные источники, выполняющие роль логических
элементов 3И-НЕ и инвертора. Фактически это стандартная схема 6-элементного
D-триггера на логических элементах, но исполненная в «аналоговом» виде.
В модели
логические функции выполнены при помощи ключей. Выходные ключи организуют
функцию «логическое И» для сигналов ШИМ-компаратора и делителя частоты (рис.
13).
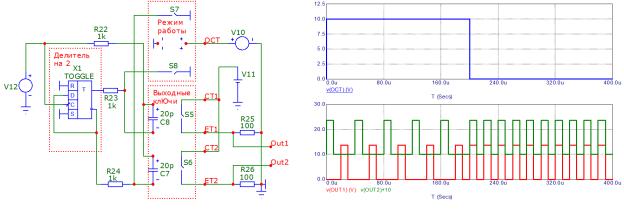
Рисунок 13 –– Организация логических функций управления выходным
каскадом
Если на «–»
выходного ключа приходит положительный импульс, то ключ не открывается и
пропускает такт (импульс с ШИМ на выход не проходит). Эти положительные импульсы
приходят на «–» входы по очереди. В результате реализуется двухтактный режим работы контроллера.
Конденсатор между входами ключа устраняет появление на выходах коротких «иголочек»
по фронтам сигнала триггера.
Однако проверка
модели с триггером TOGGLE показала, что такое решение является неоптимальным с
точки зрения совместимости с иными программами схемотехнического анализа.
Поэтому эта часть была оптимизирована для ликвидации конфликтов при вызове
Spice-модели 6-элементного триггера (правда это возникало при использовании
варианта макромодели TL494, адаптированного для использования в среде
LTspice-SWCAD).
Для общности
при работе в разных системах моделирования макромодель 6-элементного D-триггера
была заменена ее внутренней структурой, построенной на основе функциональных
источников с логическими выражениями. По функционированию эта схема аналогична
ранее рассмотренной (ср. рис. 13, 14).
Рисунок
14 –– Организация логических функций управления выходным каскадом
Такая модель
совместима с любыми программами схемотехнического анализа, использующих язык Spice. Кроме того, она позволяет создавать модели
контроллеров, предназначенных для работы в схемах с так называемы «подвешенным
питанием», в котором общий вывод микросхемы контроллера имеет ненулевой
потенциал.
Переключатель
режима работы контроллера
Для
переключения контроллера в однотактный режим, проще всего использовать ключи,
управляемые напряжением (блок OutputCTRLна рис. 14).
Если напряжение на входе OCT меньше 3 В (низкий уровень), то оба ключа
замыкаются и блокируют положительные импульсы, идущие с генераторов на «–»
выходных ключей. В результате ключи начинают замыкаться одновременно –
реализуется однотактный режим повышенной мощности.
Контроль
напряжения питания
Микросхема
TL494 включается при достижении питанием порога 5,5…7,0 В (типовое
значение 6,4 В). До этого момента внутренние шины контроля запрещают
работу генератора и логической части схемы. Ток холостого хода при напряжении
питания +15 В (выходные транзисторы отключены) не более 10 мА.
В модели это
реализовано при помощи ключа с порогом переключения 7 В (рис. 15).
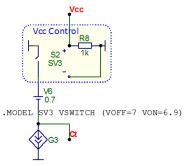
Рисунок
15 ––Схема модели контроля напряжения питания
Пока напряжение
на входе Vcс не достигнет 7 В, ключ замкнут и не дает заряжаться
времязадающему конденсатору Сt, замыкая накоротко источник тока заряда.
Выходной каскад
В реальной
микросхеме TL494
используются выходные транзисторы n-p-n
типа, включенные по схеме Дарлингтона со встроенной тепловой защитой (но без
защиты по току). Таким образом, минимальное падение напряжение между коллектором
(как правило замкнутым на плюсовую шину) и эмиттером (на нагрузке) — 1,5 В (типовое при 200 мА), а в схеме с общим эмиттером — чуть
лучше, 1,1 В (типовое).
Предельный выходной ток (при одном открытом транзисторе) ограничен 500 мА, предельная мощность на весь кристалл
— 1 Вт.
В зависимости
от необходимой степени соответствия модели и прототипа для реализации выходного
каскада можно использовать либо ключи с плавным переключением и сопротивлением
в открытом состоянии 1 Ом (рис. 16, а), либо ключи на идеальных транзисторах,
управляемы током (рис. 16, б).
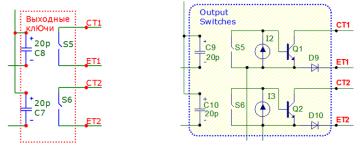
а) б)
Рисунок
16 ––Варианты построения выходного каскада.а – на идеальных ключах с плавным
переключением, б – на биполярных транзисторах
Второй вариант
является более универсальным и близким к прототипу, поэтому именно его
целесообразно использовать при окончательной реализации модели ШИМ-контроллера.
Схема проверки
модели ШИМ-контроллера TL494
После отладки
всех функциональных блоков ШИМ-контроллера можно построить его полную модель
(рис. 17).
Рисунок
17 –– Макромодель ШИМ-контроллера
Перед
формированием макромодели необходимо убедиться в правильности работы всех
узлов. Для проверки алгоритма функционирования модели ШИМ-контроллера необходимо
посмотреть влияние сигналов на управляющих входах на работу схемы (рис. 18).
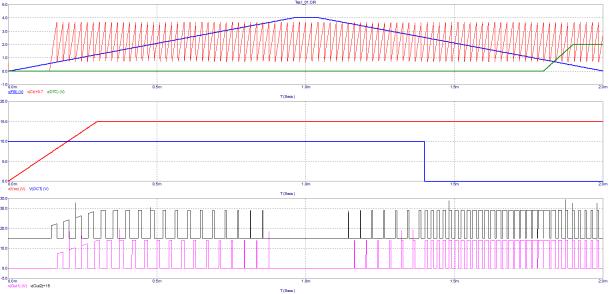
Рисунок
18 ––Временные диаграммы работы макромодели ШИМ-контроллера
После отладки
модели ее можно оформить в виде законченного компонента. Для этого нужно
создать макромодель (формат Micro-Cap) или подсхему (формат Spice).
Для создания
модели нужно обозначить все ее выводы, причем желательно в соответствии с
обозначениями, принятыми для этой микросхемы. При обозначении выводов следует
иметь в виду, что нельзя использовать некоторые стандартные имена, зарезервированные
программой и имена, совпадающие с названиями компонентов схемы (например, С1)
(см. рис. 18).
Подготовленную
схему нужно сохранить как макромодель (с расширением .mac) в каталог LIBRARY.
После этого
необходимо запустить редактор изображений компонентов Shape Editor и создать
условное графическое обозначение для модели ШИМ-контроллера (рис. 19).
Изображение строится при помощи стандартных примитивов редактора изображений
(прямоугольника, линий, текстовых надписей).
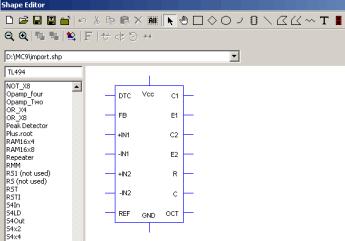
Рисунок
19 ––Условное графическое обозначение ШИМ-контроллера
После этого
необходимо поставить в соответствие модель и условное графическое изображение.
Это выполняется при помощи редактора компонентов Component Editor (рис. 20).
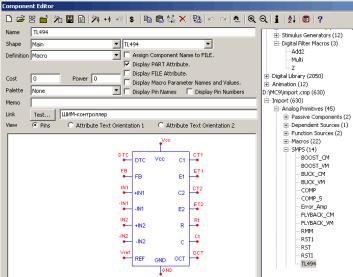
Рисунок
20 –– Создание компонента TL494 на основе заранее подготовленной модели и
условного графического обозначения
После
сохранений изменений и выхода из редактора компонентов, модель TL494 можно
использовать как самостоятельный компонент при построении устройств.
Полученная
модель была опробована на адекватность прототипу в серии компьютерных
экспериментов, использующих разные режимы работы ШИМ-контроллера. Результат
этих экспериментов показал высокую точность моделирования при приемлемой
скорости расчетов. Модель была передана разработчикам программы
схемотехнического анализа Micro-Capи включена в состав базовых библиотек этой
программы.
Впоследствии на
основе принципов, изложенных выше, была разработана специализированная
библиотека моделей функциональных узлов, которая позволяет построить быструю и
точную модель практически любого ШИМ-контроллера[5].
Литература
1.
Мэк,
Р. Импульсные источники питания. Теоретические основы проектирования и руководство
по практическому применению / Р. Мэк ; пер. с англ. С.В.
Пряничниковой. — М. :Додэка-XXI, 2008. — 272 с. : ил.
2. Christophe
P. Basso Switch-Mode Power Supplies Spice Simulations and Practical Designs @
McGraw-Hill Copyright © 2008.
3.
Амелина
М.А, Амелин С.А. Программа схемотехнического моделирования Micro-Cap 9.– М.: Горячая линия-Телеком,
2007. – 464 с.: ил.
4.
С.А.
Амелин, А.В. Емельянова. Оптимизация макромодели ШИМ-контроллера Энергетика,
информатика, инновации-2011 – сб. трудов Междунар. науч.-техн. конф. В 2 т. Т.
2. –Смоленск: РИО филиала ГОУВПО МЭИ(ТУ) в г. Смоленске, 2011. – 291 с. (с.
6–9).
5.
Амелина
М.А, Амелин С.А, Орехов В.А. Быстродействующая модель RS-триггера для программы
Micro-CAP 9. Системы компьютерной математики и их приложения /Материалы
международной конференции. Смоленск: СГПУ, 2010 г., с. 8-10
The problems of designs Spice-models controllers for
switch-mode power supplies
Amelin S. A., Amelina M. A.
In
this abstract is stated the problems of designs Spice-models PWM-controllers
for use in Spice Simulations and way of
solutions to these problems. Also,the basic principlesyou would
use tocreate fastandaccurate modelsof thisclass of electronicdevices. The
proposed methodis illustrated bya modelof PWM controllerTL494.
Key words: Spice-model, PWMcontrollers,switching
power supplies,the problemof convergence, optimization libraryof
functional units.
Филиал ФГБОУВПО «Национальный
исследовательский университет» МЭИ» в г. Смоленске
Поступила в редакцию 11.06.2012