Электронный математический и
медико-биологический журнал. - Т. 12. -
Вып. 3. - 2013. - URL:
http://www.smolensk.ru/user/sgma/MMORPH/TITL.HTM
http://www.smolensk.ru/user/sgma/MMORPH/N-39-html/TITL-39.htm
http://www.smolensk.ru/user/sgma/MMORPH/N-39-html/cont.htm
УДК 621.314.58
РАЗРАБОТКА
МОДЕЛЕЙ ШИМ–КОНТРОЛЛЕРОВ
Ó
2013 г. Амелина М. А. , Никерова Е. А.
В работе представлены основные этапы построения обобщенной модели ШИМ‑контроллера для режима управления
VoltageMode, предназначенной для использования в программе моделирования
электронных схем Micro-Cap.Рассмотрены
разновидности ШИМ-контроллеров, их основные функции и способы реализации этих
функций в обобщенной модели. Показаны пути совершенствования макромодели.
Приведены примеры моделирования импульсных источников питания с использованием
построенной модели.
Ключевые слова: импульсный источник
питания, макромодель, параметры модели, питания, ШИМ–контроллер,Micro–Cap, мягкий старт, преобразователь напряжения.
На современном этапе
развития электроники важным этапом проектирования электронных устройств
является математическое моделирование с использованием специализированных
программ схемотехнического анализа (PSpice, Orcad, Micro-Сap, Multisim и др.). Однако, для
устройств преобразовательной техники (в частности, импульсных источников
электропитания) проведение этого этапа проектирования затруднено тем, что длясущественной
части ШИМ–контроллеров пока не существует общедоступных математических моделей.
В связи с этим актуальна
задача создания универсальных моделей ШИМ‑контроллеров импульсных
источников питания, т.е. моделей, которые бы реализовывали основные функции
какой-либо группы реальных микросхем этого класса и позволяли бы путем
изменения параметров модели адаптировать ее для точного воспроизведения
параметров конкретного типа ШИМ‑контроллера. Одна из необходимых моделей
этой группы — обобщенная модель ШИМ–контроллера для управления однотактным
преобразователем постоянного напряжения в режиме VoltageMode.
Целью работы является создание
обобщенной макромодели ШИМ‑контроллера для режима управления VoltageMode
для программы моделирования электронных схем Micro-Cap.
Для достижения поставленной
цели решались следующие основные задачи:
1. Рассмотреть принципы работы и основные
расчетные соотношения импульсных регуляторов постоянного напряжения;
2. Рассмотреть разновидности и основные функции
ШИМ–контроллеров для управления импульсными преобразователями постоянного
напряжения;
3. Построить собственную модель ШИМ–контроллера
для программы Micro–Cap для использования в учебных и исследовательских целях;
4. Проверить работу построенной модели в схеме
импульсного источника питания на основе одного из регуляторов постоянного
напряжения;
5. Сделать выводы о достигнутых функциях
модели, возможных областях её применения, путях дальнейшего усовершенствования.
Принципы работы импульсных
регуляторов постоянного напряжения. В импульсных регуляторах изменение выходного
напряжения обеспечивается за счет изменения соотношения длительностей открытого и закрытого состояния силового
ключа или ключей (коэффициента заполнения импульсов).Существуют три алгоритма
изменения коэффициента заполнения: ШИМ, ЧИМ, релейное регулирование.
Основные типы импульсных
регуляторов постоянного напряжения. Импульсные регуляторы постоянного напряжения делятся
на четыре типа:
−
Понижающие
регуляторы (регуляторы I типа);
−
Повышающие
регуляторы (регуляторы II типа);
−
Инвертирующие
регуляторы (регуляторы III типа);
−
Комбинированные
регуляторы.
Все эти типы регуляторов имеют разные регулировочные
характеристики, т.е. разные зависимости выходного напряжения от коэффициента заполнения
управляющих импульсов силового ключа D.Например:
−
Понижающий
регулятор: ![]()
−
Повышающий
регулятор: 
−
Инвертирующий регулятор:
Основные функции
ШИМ-контроллеров. Широтно-импульсная модуляция (ШИМ) — это такой алгоритм
изменения коэффициента заполнения, при котором меняется длительность импульсаtи, а период следования импульсов Tостается неизменным. Коэффициент
заполненияD=tи/T — это управляющий сигнал для переключательной схемы,
меняя который можно воздействовать на ее выходной параметр. Устройство, которое
обеспечивает управление импульсным источником питания на основе алгоритма ШИМ,
называется ШИМ–контроллером.
Помимо основной функции (изменение коэффициента заполнения импульсов по заданному алгоритму) ШИМ–контроллер может выполнять ряд дополнительных функций:
−
контроль
напряжения питания;
−
ограничение
коэффициента заполнения;
−
обеспечение
плавного запуска (SoftStart);
−
защита
силового ключа от перегрузки по току;
−
тепловая
защита;
−
синхронизация
с другими ШИМ-контроллерами.
ШИМ-контроллеры существуют
для двух разновидностей построения системы обратных связей: VoltageMode
и Current Мode [1].
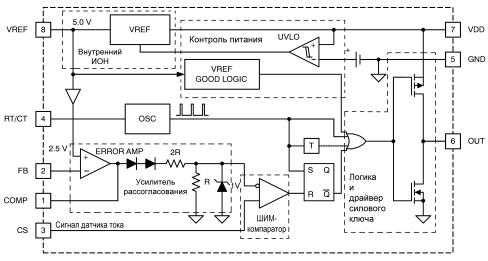
Рисунок
1 — Функциональная схема ШИМ-контроллера UС3524
с управлением
по напряжению (VoltageMode)
Тактовый генератор формирует период тактовой частоты и пилообразное напряжение для получения ШИМ. Имеется только один контур стабилизации — по выходному напряжению (рис. 1).
Рисунок
2 — Функциональная схема серии ШИМ-контроллеров UCC38С4x (UC1846А) с управлением по
току (CurrentMode)
В этих контроллерах (рис. 2)
отсутствует внутренний источник пилообразного напряжения, но есть второй канал
регулирования, на вход которого (CS) подается напряжение,
пропорциональное мгновенному значению тока силового ключа (оно близко к пилообразному).
Процесс построения модели. Модель строилась поэтапно.
Отдельно рассматривалась работа каждого блока, и затем проводилось объединение
построенных функциональных блоков. Процесс шел от простого к сложному с
добавлением новых функций и улучшением расчетной сходимости.
Ниже показан процесс
построения обобщенной модели ШИМ–контроллера для управления однотактным
преобразователем постоянного напряжения в режиме VoltageMode, включающего также схемы
защиты, плавного пуска, схему запуска с защитой от малого напряжения, драйвер
МОП–ключа.
Расчет импульсного
стабилизатора напряжения. Для возможности осуществления проверки работы модели в составе
импульсного источника питания, необходимо рассчитать его силовую часть, которая
будет строиться на основе повышающего регулятора постоянного напряжения (табл.
1).
Таблица 1 — Параметры импульсного источника питания
|
Типрегулятора |
VIN (В) |
VOUT (В) |
POUTmin–POUTmax (Вт) |
Размах
пульсаций DVOUT (в % от VOUT) |
Частотакоммутации
Fs (кГц) |
|
Повышающий |
15В±20% |
28 |
10–60 |
0,2% |
100 |
Определим границы изменения коэффициента заполнения,
считая, что регулятор находится в режиме непрерывных токов дросселя. Используя
уравнение регулировочной характеристики идеализированного повышающего
регулятора в режиме непрерывных токов, получим:
 ;
; 
Рассчитаем номинальные значения электронных компонентов схемы.
Ток
нагрузки в номинальном режиме:
 =2,14 А
=2,14 А
Ток нагрузки в режиме минимальной отдаваемой
мощности:
 =0,357 А.
=0,357 А.
Минимальное и максимальное сопротивления нагрузки:
 =13 Ом;
=13 Ом;  =78»80 Ом
=78»80 Ом
Для достижения наилучших
динамических показателей, рассчитаем преобразователь так, чтобы при наихудшем
сочетании параметров
(![]() ,
, ![]() ,
, ![]() ) он находился бы на границе режимов непрерывного и
прерывистого токов дросселя.
) он находился бы на границе режимов непрерывного и
прерывистого токов дросселя.
Регулировочная
характеристика преобразователя в режиме непрерывных токов:
 .
.
Для режима прерывистых токов выполнятся соотношение:
 ,
,
где D2 —
относительная длительность протекания тока дросселя на интервале разомкнутого
состояния силового ключа.
Из этого соотношения можно
выразить индуктивность обмотки дросселя для граничного режима:
 .
.
Рассчитываем индуктивность дросселя:
 =58мкГн»60 мкГн.
=58мкГн»60 мкГн.
Рассчитываем емкость конденсатора выходного фильтра,
исходя из заданного размаха (двойной амплитуды) пульсаций выходного напряжения:
 =218 мкФ
=218 мкФ
Возьмем
С=220 мкФ
Выбор транзисторного ключа. Ток, усредненный за
период протекания через ключ:
 =5 А
=5 А
Напряжение,
приложенное к запертому ключу:
 =28 В
=28 В
Расчетная мощность ключа:
 =140 Вт
=140 Вт
Стабилизатор напряжения на
нагрузке
(рис. 3).Используется простая модель широтно-импульсного модулятора с задающим
генератором и генератором пилообразного напряжения в виде источников напряжения
заданной формы Voltage Sourse – Pulse. Усилитель рассогласования X2
подает сигнал рассогласования на модулятор (источники сигналовVstart,Vsaw,триггер
X1). ШИМ, в свою очередь формирует импульсы с коэффициентом заполнения D1,
пропорциональным величине сигнала рассогласования. Опорное напряжение на
инвертирующем входе усилителя рассогласования рассчитывается следующим образом:
 4 В
4 В
Если выходное напряжение в
результате возмущений (изменения питающего напряжения Vin,
величины нагрузки RL) уменьшится, то сигнал рассогласования
V(err) увеличится, что в свою
очередь увеличит коэффициент заполнения D1 и напряжение на выходе
вернется к заданному (28 В) значению. Аналогичный процесс будет
происходить и при увеличении Vout, с тем лишь отличием, что
коэффициент заполнения D1 уменьшится, а Vout в результате
уменьшится также. Пусковая характеристика и стационарный режим работы
повышающего стабилизатора представлены на рис. 4 и рис. 5 соответственно.
Рисунок
3 — Стабилизатор напряжения на нагрузке
Рисунок
4 — Пусковая характеристика повышающего стабилизатора
Рисунок
5 —Диаграммы стационарного режима повышающего стабилизатора
Плавный пуск. Если не предпринимать
никаких дополнительных мер, то стабилизатор стартует с большим перерегулированием
по выходному напряжению (см. рис. 3). Для исключения перерегулирования
используется схема плавного пуска SoftStart(рис. 6). При пуске эта
система организует плавное нарастание коэффициента заполнения в течение какого-то
заданного времени. Затем когда стабилизатор стартовал, схема плавного старта
автоматически отключается от выхода усилителя рассогласования X2 (EA) и
работает отрицательная обратная связь (ООС), см. рис.7.

Рисунок
6 — Организации плавного пуска внутри ШИМ-контроллера
Здесь (см. рис. 6)
ШИМ-контроллер с системой плавного пуска (SoftStart). Конденсатор C7 в исходном
состоянии разряжен (Uc7=0). Это напряжение через открытый Б-Э переход
Q2 подается в узел Err. Реально в узле Err будет напряжение примерно на
0.7 В выше чем на базе транзистора Q2 (верхней обкладке времязадающего
конденсатора C7). Таким образом, именно напряжение на базе (C7), сдвинутое на
0.7 В вверх определяет в это время коэффициент заполнения D1. По мере заряда
С7 его напряжение увеличивается — плавно увеличивается и коэффициент
заполнения. При этом одновременно уменьшается напряжение на выходе УР (узел 10)
в результате роста напряжения на нагрузке. Когда разность между выходом УР и
базой Q2 становится ниже 0.5 В транзистор запирается и отключает
конденсатор C7 от узла Err. С этого момента включается ООС и коэффициент
заполнения определяется лишь цепью обратной связи. За время открытого состояния
Q2, которое регулируется постоянной времени R12-C7 источник успевает плавно
выйти на стационарный режим без перерегулирований. Таким образом, при старте
RC-цепь R12-C7 диктует значение коэффициента заполнения, а не усилитель
рассогласования.
Рисунок
7 — Пусковая характеристика со схемой плавного старта
Защита по току. Далее в ШИМ–контроллер для VoltageModeбыла
добавлена схема защиты по току силового ключа. В цепь силового ключа вводится
датчик тока (в рассматриваемом случае — резистивный Rizm), а
в ШИМ–контроллер второй компаратор X6 (рис. 8).
Когда напряжение с датчика
тока ключа превысит уровень порога, задаваемого источником напряжения, подключенным
к инвертирующему входу защитного компаратора X6, выход X6
переключится в единичное состояние. Этот сигнал, пройдя через схему ИЛИ X5,
сбросит RS-триггер, выключив тем самым ключ. Таким образом,
благодаря вентилю ИЛИ, ключ выключится по тому сигналу, который придет раньше.
Если раньше придет сигнал с компаратора защиты X6, то ключ закроется по
этому сигналу. Если раньше придет сигнал с ШИМ-компаратора X4 (при
этом ток в ключе не превышает допустимый порог) — выключится по сигналу
обратной связи (рис. 9).
Рисунок
8 —Организации защиты по току внутри ШИМ-контроллера
В схеме рис. 8 защита
по току установлена на уровне V1/Rizm=0.3/0.05=6 А. Подобная
защитная система требует дополнительных аппаратных затрат — введения
датчика тока.
Рисунок
9 —Стационарный режим с защитой по току
Генератор тактовых
импульсов. Для
максимального приближения поведения модели к поведению реальной микросхемы
ШИМ-контроллера в модель был введен внутренний тактовый генератор.
Тактовый генератор (ТГ)
выполнен по предельно простой схеме — ключ с гистерезисом и времязадающаяRC-цепь (рис. 10). Он генерирует пилообразное напряжение на выводе RC (узел SAW) и короткие импульсы на
выходе компаратора X3 для установки триггера
ШИМ-контроллера.
Рисунок
10 — Генератор импульсов
Принцип работы генератора
следующий. Изначально ключ разомкнут, поэтому конденсатор заряжается через
резистор от источника. Как только напряжение достигает величины порога
замыкания ключа, т. е. при прохождении нарастающим управляющим сигналом
значения VT+VH=1+1,6=2,6 В сопротивление ключа изменяется резким
скачком от ROFF до RON, ключ замкнется и конденсатор быстро разрядится через
ключ. Когда же напряжение на конденсаторе достигнет порога размыкания ключа,
при прохождении убывающим управляющим сигналом значения VT‑VH=1,6‑1=0,6 В
сопротивление изменяется скачком от RON до ROFF, ключ разомкнется, и
процесс опять повторится.
На компараторе происходит
сравнение напряжения конденсатора и постоянного напряжения 2,5 В. При этом
напряжение на конденсаторе превосходит 2,5 В лишь малый перед времени,
поэтому получаем тактовые импульсы малой длительности (рис. 11).
Рисунок
11 — Временные диаграммы работы генератора
Меняя порог VT и
гистерезис VH ключа с гистерезисом, и используя многовариантный
анализ с последующим построением Performance-функций [2], можно
добиваться полного совпадения зависимости частоты ТГ от величины времязадающих
элементов с данными справочного листка конкретного ШИМ–контроллера (рис. 12).
Рисунок
12 — Построение зависимости частоты тактового генератора от величины сопротивления
Rt
Усилитель рассогласования. Один из распространенных
методов плавного старта импульсного стабилизатора — создание на входе
ШИМ-компаратора (параллельно выходу усилителя рассогласования) плавно нарастающего
напряжения (от нуля до верхнего уровня насыщения усилителя рассогласования).
При этом коэффициент заполнения управляющих импульсов силового ключа будет
плавно нарастать, что приведет к тому, что стабилизатор будет выходить на
стационарный режим плавно без перерегулирований (выбросов выходного
напряжения). Так продолжается до тех пор, пока плавно нарастающее напряжение не
сравняется с сигналом обратной связи с выхода УР, после этого параллельная
схема SoftStart отключается и начинает работать ООС, поддерживая
стабилизатор в заданном стационарном режиме.
Однако небольшая проблема
схемы рис. 6 состоит в том, что из-за падения напряжения на база-эмиттерном
переходе эмиттерного повторителя напряжение на входе ШИМ-компаратора не может
стать меньше 0.6 В, что приведет к отличному от нулевого коэффициенту
заполненияD1 в момент начала плавного старта. Это относится к
случаю, когда нижний уровень пилы ГПН и нижний уровень насыщения УР близки к
нулю (рис. 13). В этом случае характеристики УР при его умолчательных
параметрах макромодели следующие (рис. 14).
Рисунок
13 — Усилитель рассогласования с уровнями ограничения VLow=0,1 В, Vhigh=3 В
Рисунок
14 —Передаточная характеристика УРс VLow=0,1 В, Vhigh=3 В
SoftStart
происходит несколько по-другому, если нижний уровень пилы тактового генератора
и нижний уровень насыщения УР близки к падению напряжения на открытом
база-эмиттерном переходе Vlow=0,66 В
(рис. 15). В этом случае характеристики УР при остальных параметрах
макромодели, взятых по умолчанию, следующие (рис. 16).
Рисунок
15 —Усилитель рассогласованияVLow=0,66 В,
Vhigh=2,5 В
Рисунок
16 — Передаточная характеристика УРс VLow=0,66 В,
Vhigh=2,5 В
Здесь при пуске из нулевых
начальных условий начальное напряжение на выходе усилителя рассогласования
будет также примерно 0.6 В, однако это при нижнем уровне пилообразного
напряжения Vv=0.6…0.66 создаст коэффициент заполнения D1»0. Т.е. будет происходить плавное нарастание
коэффициента заполнения от нулевого значения со скоростью, определяемой
параметрами времязадающей цепи SoftStartRss-Css.
Кроме того при изготовлении
модели конкретного ШИМ-контроллера изменением параметров Vhigh
(верхний уровень ограничения), Vlow (нижний уровень
ограничения), Pole (частота 1-го полюса АЧХ), GAIN(коэффициент передачи на
постоянном токе) можно добиться полного совпадения характеристик усилителя
рассогласования на постоянном токе (см. рис. 14, 16) и переменном токе (АЧХ,
ФЧХ) со справочными данными на конкретную микросхему ШИМ–контроллера.
Макромодель ШИМ–контроллера
режима VoltageMode с основными функциями для
программы Micro–Cap. Для построения макромодели
ШИМ–контроллера проводится объединение функциональных блоков, построенных и
рассмотренных ранее. Структура модели включает в себя следующие блоки:
усилитель рассогласования, плавный старт; защиту по току; широтно-импульсный
модулятор (ШИМ), состоящий из генератора пилообразного напряжения,
ШИМ–компаратора и RS–триггера; драйвер силового ключа (рис. 17, а).
а
б
Рисунок
17 — Обобщенная модель ШИМ-контроллера с основными функциями, 1 этап:
а — внутренняя структура; б – макромодель
Алгоритм работы
ШИМ–контроллера, функционирующего в режиме VoltageMode, следующий. На
инвертирующий вход усилителя рассогласования подается сигнал обратной связи,
который в свою очередь сравнивается с опорным напряжением. После этого полученный
сигнал рассогласования поступает на вход ШИМ–компаратора. На второй вход подается
пилообразное напряжение с тактового генератора. Компаратор срабатывает, когда
сигнал пилообразного напряжения превысит сигнал рассогласования. Сигнал сброса,
выдаваемый ШИМ–компаратором, объединяется по ИЛИ логической схемой с сигналом
компаратора датчика тока (защита по току). В результате формируется сигнал
сброса управления логической схемой выходного драйвера (в рассматриваемую на
данном этапе модель универсального контроллера этот драйвер не входит).
Схема плавного пуска SoftStart
организует плавное нарастание коэффициента заполнения в течение начального
времени старта из нулевых начальных условий. Затем, когда стабилизатор
запустился, схема плавного старта отключается и в дальнейшем величина коэффициента
заполнения определяется исключительно сигналом отрицательной обратной связи.
Структура обобщенной модели
ШИМ–контроллера реализована с использованием специализированной библиотеки
компонентов программы Micro-Cap, которая включает в себя Spice-модели,
специально разработанные именно для этой цели. Модель оформлена в виде
библиотечного компонента программы (рис. 17, б).
Для адаптации универсальной
модели под конкретный тип ШИМ–контроллера необходимо изменить параметры генератора
тактовых импульсов и усилителя рассогласования.
Различные ШИМ–контроллеры
имеют различные зависимости частоты коммутации (частоты внутреннего тактового генератора)
от параметров времязадающих цепей Ct, Rt. Чтобы иметь возможность адаптировать
универсальную модель под конкретный тип ШИМ–контроллера, необходимо обеспечить
возможность задавать внутренние параметры тактового генератора (напряжение
нижнего порога Vv, верхнего порога Vp, сопротивление разрядной
цепи Rdisch) через параметры макромодели.
В усилителе рассогласования
для адаптации под конкретный тип ШИМ‑контроллера необходимо задать
параметры, определяющие его поведение в частотной области: коэффициент передачи
GAINи частоту первого полюса POLE. Нижний и верхний порог
ограничения (Vlow, Vhigh).в модели рассчитываются
автоматически в зависимости от заданных параметров тактового генератора, что
соответствует реальному устройству микросхем ШИМ-контроллеров.
Моделирование импульсного
источника питания на основе макромодели ШИМ–контроллера с основными функциями PWMVM7. Для
подтверждения адекватности построенной модели проводилось моделирование в среде
программы Micro-Cap и сравнение результатов с
параметрами и характеристиками, указанными в технической документации на
соответствующие микросхемы. В частности, была проверена работа модели универсального
ШИМ–контроллера в типовой схеме повышающего преобразователя напряжения (рис.
18).
Приведенные ниже (рис. 19)
временные диаграммы показывают, что разработанная модель обеспечивает
реализацию основных функций ШИМ‑контроллера. Разработанная модель
оформлена в виде макроса Micro‑Cap и
пригодна для моделирования однотактных преобразователей напряжения, работающих
в режиме Voltagemode. При необходимости эта модель может быть дополнена
блоком контроля напряжения питания или другими сервисными функциями,
характерными для современных ШИМ‑контроллеров.
Рисунок
18 — Имитационная модель повышающего стабилизаторана основе
обобщенного ШИМ–контроллера PWMVM7
Рисунок
19 — Пусковая характеристика повышающего стабилизатора
При проведении имитационного
моделирования максимальный шаг расчета MaximumTimestepдля обеспечения сходимости
составил 1E-8, что привело к значительным временным затратам на
расчет.
Изменение внутренней
структуры ШИМ–контроллера. Далее макромодель с основными функциями PWMVM7 подверглась усовершенствованию
(рис. 20, а) до макромодели PWMVM8 (рис. 20, б).
Непосредственно в широтно-импульсный модулятор RS-триггер здесь не входит, он используется
для срабатывания защиты по току. Модулятор работает с логикой и компаратором.
Отпадает необходимость в интегрирующей RC‑цепи для формирования
задержки стартового импульса (см. рис. 17, R4-C4).
Рисунок
20 — Обобщенная модель ШИМ-контроллера с основными функциями, 2 этап:
а – внутренняя структура; б – макромодель
Алгоритм работы
ШИМ–контроллера следующий. На инвертирующий вход усилителя рассогласования
подается сигнал обратной связи, который в свою очередь сравнивается с опорным
напряжением. После этого полученный сигнал рассогласования поступает на вход
ШИМ–компаратора. На второй вход подается пилообразное напряжение с тактового
генератора. Компаратор срабатывает, когда сигнал пилообразного напряжения
превысит сигнал рассогласования. В этой схеме сигнал сброса, выдаваемый ШИМ‑компаратором,
объединяется по ИЛИ логической схемой с сигналом инвертирующего выхода RS–триггера
(сигнал с компаратора датчика тока — сигнал сброса RS–триггера).
В результате формируется сигнал сброса управления логической схемой выходного
драйвера (в модель универсального контроллера этот драйвер пока не входит).
Модель оформлена в виде
библиотечного компонента программы PWMVM8 (рис. 20, б).
Так же для подтверждения
адекватности построенной модели проводилось моделирование в среде программы Micro-Cap
импульсного источника питания на основе повышающего регулятора. В частности,
проверена работу модели универсального ШИМ–контроллера в типовой схеме
повышающего преобразователя напряжения (рис. 21).
Рисунок
21 — Имитационная модель повышающего стабилизатора на основе
обобщенного ШИМ–контроллера PWMVM8
При моделировании можно увидеть, что расчет идет при шаге 1E-7 (большем) и на моделирование затрачивается меньше времени.
Рисунок
22 — Пусковая характеристика с защитой по току с PWMVM8
Сравнительные результаты моделирования пуска стабилизаторов из нулевых начальных условий:
- Усовершенствованная модель PWMVM8 (рис. 22). Расчет идет с шагом MaximumTimestep=1E-7, на моделирование затрачивается 4.8 секунды;
- Первый вариант модели PWMVM7 (с триггером в модуляторе).Расчет идет с шагомMaximumTimestep=1E-8, на моделирование затрачивается 27 секунд.
Таким образом, введенное
усовершенствование (оптимизация структуры)позволила улучшить сходимость (расчет
идет достаточно точно при в 10 раз большем шаге MaximumTimestep), на моделирование выхода
на стационарный режим затрачивается в 6 раз меньшее время по сравнению с макромоделью
1-го этапа.
Добавление драйвера силового
ключа и схемы запуска, совмещенной с защитой от пониженного напряжения. Далее в модель был добавлен
драйвер силового ключа преобразователя — ключи с плавным переключением S2, S3 (рис.
23). Это необходимо для того, чтобы как и в реальном ШИМ–контроллере,
напряжение выдаваемое на управляющий электрод силового ключа V(Out)
было связана с напряжением питания микросхемы контроллера. Строится на двух
ключах. Когда на выходе элемента ИЛИ-НЕ X11 высокий уровень силовой
ключ должен открываться, т.е. на его управляющий электрод (затвор) должен
подаваться потенциал близкий к напряжению питания ИМС. Это достигается замыканием
ключа S3 и размыканием S2 при единичном сигнале
вентиля ИЛИ-НЕX11.
При нуле на выходе X11
силовой ключ должен запираться, т.е. на его затвор подается потенциал близкий к
потенциалу «земли». Это происходит при замыкании ключа S2 и размыкании ключа S3 схемы
драйвера. Соответственно параметры ключей взяты взаимно противоположными —
чтобы когда замыкается S2, размыкался S3 и
наоборот. R5, C1 добавлены для улучшения расчетной
сходимости. Соответственно появляется еще один внешний вывод макромодели —
вывод для плюса ее напряжения питания VDD.
Как правило, запуск
ШИМ–контроллера происходит с гистерезисом в зависимости от величины подаваемого
на него напряжения питания. Это необходимо для организации питания
ШИМ–контроллера от самого преобразователя постоянного напряжения.
ШИМ–контроллер включается при превышении напряжением VDD напряжения верхнего порога Von>Voff.
Это значит, что открывается трехвходовой вентиль ИЛИ-НЕ, управляющий драйвером,
начинает вырабатываться внутреннее опорное напряжение Vref, микросхема начинает
потреблять ток от внешнего источника питания по шине VDD. Это реализовано на
триггере Шмитта X7, инверторе X10, ключе X9,
усилителе-ограничителе X7 (ИОН), и ключе X12 с
резистором R6 (имитация потребления тока микросхемой по шине
питания). При включении — VDD превысило Von,
триггер Шмитта X7 выдает высокий уровень (10 В), отпирающий
через инвертор X10 вентиль ИЛИ–НЕ X11 и замыкающий ключи X9 и X12. Тем самым, опорное
напряжение Vref, вырабатываемое усилителем-ограничителем X6 через
замкнутый ключ X9 начинает поступать на элементы
ШИМ–контроллера — тактовый генератор и усилитель рассогласования. Тактовый
генератор начинает вырабатывать тактовые импульсы, УР — вычитать из
половины опорного напряжения напряжение на нагрузке, начинается потребление
тока по шине VDD, вентиль ИЛИ–НЕ X11 теперь способен
пропускать на вход драйвера СК импульсы, генерируемые ШИМ‑компаратором.
ШИМ‑контроллер начинает работать по своему стандартному (а не пусковому)
алгоритму.
а
б
Рисунок
23 — Обобщенная модель
ШИМ-контроллера с основными и дополнительными функциями PWMVM9:
а – внутренняя структура; б – макромодель
При падении в уже запущенном
ШИМ контроллере напряжения на выводе VDD ниже Voff,
триггер ШмиттаX7 переключается в низкое состояние на своем выходе
(0 В), размыкая тем самым ключи X9, X12 и запирая вентиль ИЛИ-НЕ X11
через инвертор X10. Теперь выход X11 будет находиться в низком
состоянии, нижний ключ драйвера замыкается, а следовательно, и напряжение V(out),
подаваемое на затвор ключа равно нулю — ключ не будет коммутироваться.
Также прекращается работа и остальных составных частей ШИМ‑контроллера —
опорное напряжение Vref через разомкнутый X9 на его составные части
перестает подаваться, тактовый генератор останавливается и т.д. Микросхема
ШИМ-контроллера в результате размыкания ключа X12 перестает потреблять ток
по шине VDD.
Список параметров
макромодели с дополнительными функциями расширился. Теперь в него добавляются
верхний и нижний пороги включения (соответственно Von и Voff,
Von всегда больше Voff), напряжение внутреннего
ИОН Vref. Параметры, задающие рассмотренные выше
дополнительные функции, также имеются в большинстве реальных современных ИМС
ШИМ-контроллеров.
Моделирование импульсного
источника питания на основе обобщенной модели ШИМ–контроллера с основными и
дополнительными функциями. Моделирование проводилось при одном общем источнике питания 12 В,
питающем и преобразователь постоянного напряжения и ШИМ–контроллер(рис. 24).
При этом было задано изменение питающего напряжения по трапецеидальному закону,
так, чтобы пересекались пороги срабатывания схемы UVLO (UnderVoltageLockOut) .
Рисунок
24 — Имитационная модель повышающего стабилизатора на основе
обобщенного ШИМ–контроллера
Рисунок
25 — Временные диаграммы при работе стабилизатора с включенной защитой по
току на уровне 10 А
Из полученных осциллограмм
(рис. 25, 26) видно, что как только напряжение питания превысит значение
верхнего порога, начинает вырабатываться внутреннее опорное напряжение,
микросхема начинает потреблять токI(X1, R6) от внешнего источника
питания. На представленных графиках (рис. 25, 26) зависимости выходного
напряжения V(Load) видно, что его величина не
превосходит 28 В, а плавно нарастает до своего стационарного значения. Перерегулирований
выходного напряжения не происходит.
Рисунок
26 — Временные диаграммы при работе стабилизатора с включенной схемой
плавного пуска
Моделирование повышающего стабилизатора напряжения с одним общим источником питания подтвердило правильную отработку макромоделью основных и дополнительных функций ШИМ‑контроллера.
Построенная модель показала
хорошие результаты и по верности воспроизведения процессов в импульсных
стабилизаторах напряжения и по скорости моделирования и может использоваться в
научно-исследовательских и учебных целях. Меняя значения параметров
макромодели, ее можно адаптировать под любой промышленный ШИМ–контроллер, который
выпускается серийно. Усовершенствование возможно как в плане распространения
функций управления и на двухтактные преобразователи, так и введения дополнительной
местной обратной связи по амплитудному току ключа, т.е. реализации наряду с режимом
VoltageMode и режима Currentmode.
Литература
1.
Мэк, Р.
Импульсные источники питания. Теоретические основы проектирования и руководство
по практическому применению / Пер. с англ. — М. : Издательский дом «Додэка-XXI»,
2008. — 272 с.: ил. (Серия «Силовая электроника»).
2.
Амелина
М. А., Амелин С. А. Программа схемотехнического моделирования Micro‑Cap
8. – М.: Горячая линия-Телеком, 2007. – 464 с. ил.
MODELLING
PWMCONTROLLERS
Amelina M. A., Nikerova E. A.
The paper
describes the development of a generalized model of the PWM controller to control
mode Voltage Mode for electronic circuit simulation program Micro-Cap. The
paper discusses the types of PWM controllers and their basic functions. Stages
of constructing and improving macro. Examples of modeling of switching power
supply using the constructed model.
Key words:
switch-mode power supplies, macro, model, the parameters of the model, the PWM
controller, Micro-Cap, Soft Start, Current Protection.
Филиал ФГБОУВПО «Национальный
исследовательский университет» МЭИ» в г. Смоленске
Поступила в редакцию 29.10.2013.