Математическая морфология.
Электронный математический и
медико-биологический журнал. - Т. 12. -
Вып. 4. - 2013. - URL:
http://www.smolensk.ru/user/sgma/MMORPH/TITL.HTM
http://www.smolensk.ru/user/sgma/MMORPH/N-40-html/TITL-40.htm
http://www.smolensk.ru/user/sgma/MMORPH/N-40-html/cont.htm
УДК
004.021
Кинематические
схемы стабилизированных платформ и типы амортизационных подвесов для
оптико-электронных систем. Обзор
Ó 2013 г. Алеев Р. М., Леонтьев А. В., Новиков А. Ю.,
Чижиков М. А.
Для обеспечения
круглосуточных полетов и посадок вертолета, наблюдения и разведки с его борта
служат оптико-электронные системы. Под наблюдением понимается видение неба,
окружающего ландшафта и объектов, представляющих интерес для пилота. Под разведкой
понимается не только видение полезных объектов, но и их количественная и качественная
оценка: измерение их координат, дальности, геометрических размеров, скорости движения,
состояние функционирования, распределение температуры по поверхности объектов и
пр [3]. Причем разведка может быть как земной поверхности, так и воздушного
пространства.
Для наблюдения и слежения за
наземными объектами в условиях угловых колебаний носителя оптико-электронные
системы, устанавливают на одноконтурные (с двумя степенями свободы) и
двухконтурные (с четырьмя и более степенями свободы) стабилизированные
платформы.
Одноконтурные
стабилизированные платформы (рис. 1а) состоят из неподвижной части 1, жестко
соединяющейся с бортом носителя, курсовой рамки 2 и тангажной рамки 3, с установленной
в ней полезной оптико-электронной нагрузкой (ПОЭН). Одноконтурная стабилизированная
платформа обладает следующими преимуществами: малые вес и габариты, простота
конструкции, относительно низкая цена. Однако одноконтурная платформа не
позволяет стабилизировать линию визирования с большой точностью. Также у одноконтурных
платформ существует мертвая зона (при совмещении оси визирования с осью вращения
курсовой рамки), в которой стабилизация линии визирования ПОЭН невозможна [2].
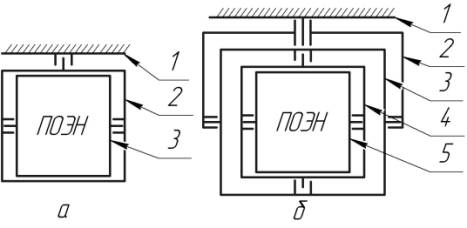
Рис.1 Кинематические схемы
стабилизированных платформ
Более высокой точности
стабилизации линии визирования ПОЭН позволяют получить двухконтурные
стабилизированные платформы (рис. 1б). В платформах подобного типа задачи
стабилизации и наведения линии визирования разделены между внутренним и внешним
контуром. Двухконтурная стабилизированная платформа состоит из неподвижной
части 1, внешнего подвеса 2 и 3, внутреннего подвеса 4, 5 и ПОЭН, установленной
в тангажной рамке внутреннего подвеса.
Обзор и наведение линии
визирования ПОЭН осуществляется разворотом внешних рамок стабилизированной
платформы. Внутренний подвес обеспечивает стабилизацию линии визирования в
небольших углах, порядка 5, и может
иметь две или три степени свободы.
Для устранения
высокочастотных поступательных вибраций и угловых колебаний, передаваемых от
носителя стабилизированной платформе, обычно ее закрепляют на носителе через
амортизаторы.
Основная задача
амортизационного подвеса – снижать амплитуду вибраций носителя, проходящих на
стабилизированную платформу, и главное, не допускать перехода поступательных колебаний
носителя в угловые колебания платформы. Таким образом, в мировой практике
распространение получили 3 конфигурации амортизационного подвеса [4,5,6],
удовлетворяющие этим требованиям: амортизаторы между носителем и
стабилизированной платформой, скомбинированные с параллелограммом,
предотвращающим преобразование поступательных вибраций носителя в угловые
колебания платформы (рис. 2а); амортизаторы между носителем и стабилизированной
платформой, при этом центр масс платформы с ПОЭН совмещается с плоскостью крепления
подвеса к носителю (рис. 2б); амортизаторы, расположенные между внешними
рамками наведения и внутренними рамками стабилизации (рис. 2в).
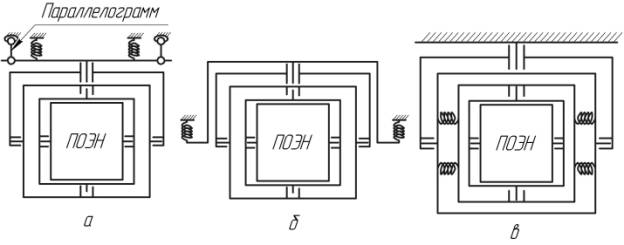
Рис.2 - Разновидности
амортизационных подвесов
В таблице 1 приведены
основные преимущества и недостатки данных схем амортизационных подвесов.
|
Таблица 1 |
||
|
|
Преимущества |
Недостатки |
|
1-ая
схема |
· Нет частей, выступающих за плоскость крепления · Низкая частота собственных колебаний |
· Сложность параллелограммного механизма |
|
2-ая
схема |
· Низкая частота собственных колебаний · Простота конструкции |
· Часть конструкции располагается выше плоскости крепления |
|
3-ая
схема |
· Нет частей, выступающих за плоскость крепления |
· Более высокая частота собственных колебаний |
Первую и третью схемы
амортизационного подвеса благодаря отсутствию выступающих частей выделяет
возможность установки стабилизированной платформы на плоскую поверхность, т.е.
нет необходимости в специальной полости (выемке) в борту носителя.
В тоже время для первой
схемы присущи сложность амортизационного подвеса и некоторая зона
нечувствительности из-за наличия сухого трения и люфтов в подшипниках параллелограммного
механизма[1].
Для третьей схемы, из-за
размерных ограничений пространства между тангажной рамкой внешнего подвеса и
внутренним подвесом, необходимо использовать более жесткие амортизаторы (чем в
первой и второй схеме), что приводит к повышению частоты собственных колебаний платформы,
а значит и к уменьшению диапазона частот работы амортизационного подвеса.
Вторая схема является
наиболее простой, а благодаря подбору амортизаторов и меньших ограничений по их
размещению обеспечивается широкий диапазон рабочих частот амортизационного
подвеса.
литература
1. Бабаев А.А. Амортизация, демпфирование и стабилизация бортовых оптических приборов // Машиностроение, Ленингр. отделение. 1984. С. 27-30.
2. Бесекерский В. А. Динамический синтез систем гироскопической стабилизации. 1968. С.23-31.
3. Волков В.Г. Вертолетные оптико-электронные системы наблюдения и разведки, журнал "Специальная техника" № 3 2001 г.
4.
Патент US 5897223 A, Stabilized platform system for camera,17.11.1997.
5.
Патент WO 2012170673 A1,Gimbal system with a translational mount,
07.06.2012.
6.
Патент US 6154317 A, Device for stabilizing of a remotely controlled sensor,
like a camera, 30.09.1997.
Поступила в редакцию 11.11.2013.