Математическая морфология.
Электронный математический и
медико-биологический журнал. - Т. 12. -
Вып. 4. - 2013. - URL:
http://www.smolensk.ru/user/sgma/MMORPH/TITL.HTM
http://www.smolensk.ru/user/sgma/MMORPH/N-40-html/TITL-40.htm
http://www.smolensk.ru/user/sgma/MMORPH/N-40-html/cont.htm
УДК 615.473.92
АВТОМАТИЧЕСКАя система инъекции факторов роста
Ó 2013 г.
Найдёнов Е. В., Якименко И. В.
В работе описан процесс разработки сложного медицинского устройства,
предназначенного для инъекций растворов и медицинских препаратов. Устройство может
быть использовано при проектировании медицинских аппаратных платформ
биологических и биохимических реакторов для областей фармакологии и клеточной
биологии.
Ключевые слова: биологический реактор, аппаратная платформа, инъекция, факторы роста,
шаговые двигатели.
Фактор роста эндотелия
сосудов (Vascular endothelial growth
factor (VEGF)) – сигнальный белок, вырабатываемый клетками
для стимулирования ангиогенеза (роста новых сосудов в уже существующей
сосудистой системе) и васкулогенеза (образование эмбриональной сосудистой
системы). Белки VEGF служат частью системы, отвечающей за восстановление подачи кислорода к тканям в
ситуации, когда циркуляция крови недостаточна. Основные функции VEGF – создание
новых кровеносных сосудов в эмбриональном развитии или после травмы, усиление
роста мышц после физических упражнений, обеспечение коллатерального
кровообращения (создание новых сосудов при блокировании уже имеющихся). В своём
приближении факторы роста (ФР) – естественные биологические соединения,
способные стимулировать рост, пролиферацию и/или дифференцировку живых
клеток.
Организм человека вырабатывает ФР самостоятельно в
процессе жизнедеятельности. Однако в лабораторных условиях при культивировании искусственных
эндотелиальных соединений ФР не образуются. Данное обстоятельство делает актуальным
разработку способа и устройства инъекции ФР в живые ткани в искусственной
среде. Такой средой может являться биологический реактор для культивирования
клеточных образований.
Указанная среда применения формирует ряд
ограничений для использования традиционных средств инъекции. В первую очередь,
инъектор должен быть полностью автономным и содержать систему как внешнего управления,
так и внутреннего (реализованной на программируемых микроконтроллерных
устройствах). Такое техническое требование исключит вмешательство человека в
среду биокамеры. Второе ограничение касается размеров инъектора и объёма
вводимых ФР в исследуемые биообразования. Поскольку размеры биологической
камеры, в которой происходит процесс культивирования эндотелиальных соединений очень
малы, то следовательно необходимо минимизировать конструкцию инъектора таким
образом, чтобы оставалась возможность его свободного перемещения в заданной
плоскости в области камеры. Третье ограничение касается системы навигации инъектора
и фоторегистрации изменений процесса формирования эндотелия. Для этих целей
следует применять систему технического зрения (СТЗ). СТЗ будет формировать сигналы
наведения инъектора в указанную область по результатам фоторегистрации. Описанные
ограничения позволят теоретически и технически приступить к разработке автоматической
системы инъекции факторов роста (АСИФР).
Процесс разработки АСИФ начинается с описания
блок-структуры её работы, представленной на рисунке 1.
Рисунок 1 – Блок структура
функционирования автоматической системы инъекции ФР
Основой разрабатываемого устройства
является платформа механического манипулятора, которая управляется ШД. Точность
манипуляций ШД позволяет правильно располагать инъектор в требуемой области
биологической камеры. Платформа крепится к стенкам биологического реактора и может
быть разнообразна по виду и конструкции – рисунок 2. Передвижение рамки с
инъектором по платформе происходит путём перемещения ШД по ленте. Размер зубцов
ленты определяет расстояние, на которое передвинется рамка при одном обороте
шагового двигателя. Принцип перемещения по размеченной ленте лежит в основе разнообразных
станков с ЧПУ, установках лазерной резки, в поворотных механизмах образцов армейского
наземного и воздушного вооружения и др. Размер рамки платформы определяется областью
инъекции, а вид конструкции – сложностью биологической камеры. Для задачи
манипуляции инъектором потребуется платформа с двумя ШД.
Рисунок
2 – Конструкции манипуляторов на шаговых двигателях
а) с внешней лентой; б) с
нанесёнными на корпус шагами ленты
Один из двигателей отвечает за
перемещение манипулятора с инъектором вдоль горизонтальной оси, второй – вдоль
вертикальной. Если манипулятор с прикреплённым к нему блоком инъектора необходимо
перемещать вдоль третьей оси (вертикально), то в конструкцию добавляется ещё
один ШД – рисунок 3.
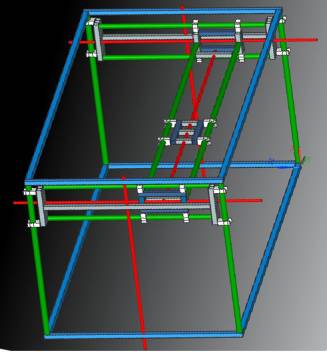
Рисунок 3 – Модель платформы
с перемещением рамки в трёхмерной плоскости (область инъекции находится внутри
конструкции)
ШД управляются при помощи микроконтроллера,
который подаёт требуемые импульсы – код управления манипулятором. Импульсы
формируются по сигналам с СТЗ, которая в свою очередь передаёт данные об
изменениях исследуемого объекта на центральны процессор управляющего компьютера
или аппаратной платформы. СТЗ отслеживает изменения в исследуемой области
биореактора, производя серию снимков камерой фотонаблюдения по заданному алгоритму
работы. По изменениям в отслеживаемых процессах в биореакторе, СТЗ вырабатывает
сигнал о необходимости ввода ФР. Кроме того процессом управления может
заниматься человек, самостоятельно задавая микроконтроллеру команды управления
ШД. После получения команд микроконтроллером начнётся процесс установки
манипулятора в зарегистрированную/заданную вручную область. Структура передачи
сигналов/команд управления в разрабатываемой АСИФР представлена на рисунке 4.
Рисунок 4 – Обмен информацией между узлами устройств в
АСИФР
Другим ключевым элементом АСИФР является сам
инъектор. Предпологается использовать безыгольный инъектор распылительного типа
с внутренней системой накачки. Вводимые искусственно ФР можно расположить в
пробирке или миниатюрном резервуаре. Инъектор с ним будет связан по гибкой трубке.
Сам миниатюрный резервуар можно расположить непосредственно на рамке платформы
манипулятора рядом с инъектором, либо расположить за пределами области инъекции
на внешнем корпусе биологического реактора. Сигнал закачки ФР в инъектор
формирует микронтроллер, отвечающий, как за перемещение ШД, так и за обработку
данных с СТЗ.
Внешний вид модели АСИФР приведён на
рисунке 5.
Рисунок 5 – Модель структуры автоматической
системы инъекции факторов роста
Аппаратная платформа, в которой
используется манипулятор с инъектором может работать как в автономном режиме и
передавать на управляющий компьютер данные, так и в режиме управления через
специализированные программы на ПК. Фотокамерой делается серия снимков, которая
затем проходит пороговую обработку по заданному минимальному коэффициенту
изменений. В ячейке сформированной матрицы, в которой оказывается значение
меньше либо равное пороговому присутствует наибольшее изменение структуры, а
следовательно и наибольшая активность. Именно в эту ячейку будет направлен манипулятор
с инъектором. Матрица значений коэффициентов и минимальный порог может быть
сформирована вручную и самостоятельно загружена в микроконтроллер для
выполнения команд управления шаговыми двигателями.
На рисунке 6 представлен процесс
обработки изображения СТЗ и формирование управляющих импульсов для ШД.
Рисунок 6 – Алгоритм
выполнения операции дозирования
Важной чертой в предложенной схеме
является определение положения начальной точки. Если базовым расположением
манипулятора является одна из угловых ячеек размерной сетки, то она вносится в
качестве исключения при перемещении рамки манипулятора. Если начальное
положение манипулятора находится за контуром сетки, то число шагов будет
увеличено в зависимости от возможного положения – рисунок 6.
Рисунок
7 – Старт манипулятора из различных положений
Кроме того, при проектировании
манипулятора необходимо выбирать ШД с количеством внутренних обмоток (определяет
число и угол поворотов), которые бы соотносились с размерной сеткой,
формируемой фотокамерой СТЗ. От количества ячеек размерной сетки и угла одного
поворота ШД заявляется требуемая точность операции манипулирования. При малой величине
ячейки размерной сетки потребуется выбор ШД с небольшим углом поворота по ленте
рамки.
Исследовать процесс работы инъектора на
основе рассматриваемого типа манипулятора можно при помощи моделировании в
системе компьютерной математики. Анализ сложной системы управления шаговыми
двигателями по сигналам СКЗ удобно проводить на функциональном и системном
уровне. С такими задачами логично применять пакет Matlab&Simulink. В основе
схемы для моделирования будут находиться блоки прямой обработки изображения и
формирования матрицы данных. Особенностью пакета компьютерной математики
является программная поддержка наиболее распространённых языков программирования
микроконтроллеров, а также их аппаратная поддержка самой оболочкой пакета.
Таким образом, возникает возможность компиляции кода управления напрямую из
окна программы и перепрограммировать микроконтроллер не отключая его от внешней
системы манипулятора. Рассматриваемая система манипулятор-СТЗ использована в
блоке системы распределения факторов роста (СРФР) тканевых образований
аппаратной платформы биореактора. Управляющий ШД микроконтроллер является одним
из элементов сложной системы контроля аппаратной платформы, которая благодаря
внутренней схеме с центральным микропроцессором позволяет проектировать
полностью автономное устройство –
рисунок 8.
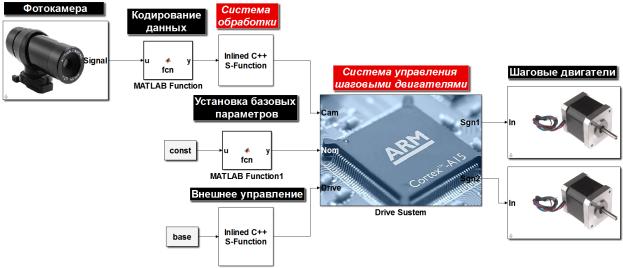
Рисунок 8 – Модель системы
передачи управляющих сигналов с СКЗ в СРФР
в среде Matlab&Simulink
Сигналы управления ШД формируют элементы
цифровой схемотехники, повторяя поведение реального микроконтроллера. В
частности, схему можно обновить, заменив цифровой блок обработки системы
управления на элемент отладочной платы и управлять физической микросхемой через
отладочный модуль.
Проектирование различных системы
манипуляции на основе шаговых двигателей представляет сложную
инженерно-расчётную работу. В неё входят поиск системы формирования входных
сигналов, проектирование и программирование драйвера управления шаговыми
двигателями, подбор типа используемых двигателей и многое другое [6]. В качестве
системы входных сигналов можно использовать СКЗ с установленным порогом срабатывания.
Учитывая особенности применяемой фотокамеры можно провести выбор шаговых
двигателей по требуемой точности шагов/оборотов. Исследовать весь процесс
работы проектируемой системы манипуляции позволяет система компьютерной
математики. Таким образом, представленные методики и исследования могут быть
применены на практике при разработке различных систем манипуляции.
AUTOMATIC
INJECTION OF GROWTH FACTORS
Naydyonov
E. V., Jakimenko I. V.
The paper describes a complex process of developing a medical device intended
for injection solutions and medicines. The device can be used in the design of
medical hardware platforms biological and biochemical reactors for the areas of
pharmacology and cell biology.
Key words: biological reactor, the hardware platform, the
injection of the factors ro-hundred, stepper motors.
Филиал ФГБОУВПО «Национальный
исследовательский университет» МЭИ» в г. Смоленске
Поступила
в редакцию 15.11.2013