Математическая морфология.
Электронный математический и
медико-биологический журнал. - Т. 13. -
Вып. 1. - 2014. - URL:
http://www.smolensk.ru/user/sgma/MMORPH/TITL.HTM
http://www.smolensk.ru/user/sgma/MMORPH/N-41-html/TITL-41.htm
http://www.smolensk.ru/user/sgma/MMORPH/N-41-html/cont.htm
УКД 621.313.333
МАТЕМАТИЧЕСКИЕ
МОДЕЛИ ИНДУКТОРНЫХ ДВИГАТЕЛЕЙ ПРИ ИМПУЛЬСНОЙ ФОРМЕ ПИТАНИЯ ОТ
СИНУСОИДАЛЬНОГО ИСТОЧНИКА
Ó
2014 г. Кулик Ю. Д., Полющенков И. С.
В работе предлагается
математическая модель для тихоходных индукторных двигателей с импульсной формой
питания непосредственно от синусоидального источника. Математическое описание
учитывает параметрический характер цепи обмотки фазы введением двух параметров:
относительного значения основной составляющей индуктивности и соотношения
постоянной составляющей индуктивности с активным сопротивлением цепи обмотки
фазы. Предлагаемая модель для индукторных двигателей с электромеханической и
электромагнитной редукцией позволяет решать инженерные задачи анализа и синтеза
для указанных двигателей.
Ключевые слова: сосредоточенная обмотка
фазы, вентильная коммутация, электромеханическая и электромагнитная редукция,
энергетический коэффициент полезного действия, угол нагрузки.
Получение низких частот вращения остается актуальной задачей электромеханики. Альтернативными способами понижения частоты вращения традиционной схеме быстроходный двигатель плюс редуктор являются:
1. Электромеханическая редукция (механический редуктор совмещается с электромагнитной
частью таким образом, что воздействие в передаче осуществляется на промежуточное звено, минуя быстроходное – на
сателлит в планетарной передаче, на гибкий элемент в волновой передаче);
2. Электромагнитная (магнитные структуры статора и
ротора выполняются явнополюсными с определенным соотношением между ними).
Группу двигателей с электромеханической редукцией образуют двигатели с катящимся (эксцентрично расположенным) ротором и волновые двигатели. Группу двигателей с электромагнитной редукцией – шаговые двигатели и вентильно-индукторные двигатели.
В основе рассматриваемых в статье индукторных
двигателей является использование эффекта взаимодействия ферромагнитного тела с
магнитным полем. Представляет интерес для указанных модификаций индукторных двигателей
при формировании многофазной импульсной системы от синусоидального источника
установить единое математическое описание физических процессов с целью
получения необходимых выражений для оценки электромагнитного момента, а также
энергетических показателей в целом.
При электромеханической редукции частота вращения
выходного вала определяется с помощью выражения
|
|
(1) |
а
при электромагнитной
|
|
(2) |
где N – число одноименных фазных зон в схеме обмотки;
iр –
передаточное отношение механического редуктора;
ZR = N(сm2 ±
1) - число зубцов (полюсов) ротора;
с –
число зубцов образующих гребенчатую зону на полюсном выступе (определяется как
отношение полюсного деления статора к полюсному делению ротора, при их отсутствии
с = 1);
m2 –
число фаз сосредоточенной обмотки статора;
![]() – синхронная
частота перемещения МДС обмотки статора.
– синхронная
частота перемещения МДС обмотки статора.
При частоте сети
f = 50 Гц и
электромеханической редукции можно получать n2 от
нескольких десятков до долей оборота в минуту, а при электромагнитной n2 от
нескольких сотен до несколько десятков оборотов в минуту.
Полюсные структуры статоров определяются следующими
выражениями:
при электромеханической
|
|
(3) |
при электромагнитной
|
|
(4) |
где
s – степень расщепления магнитного потока в фазной
зоне.
Наличие дополнительных полюсов в фазной зоне у двигателей с эксцентрично расположенным
ротором преследует цель уменьшения
момента инерции ротора, а при волновой передаче - сделать гибкий ротор
податливым для перемещения волны деформации. При наличии s катушек в фазной зоне они обычно соединяются между
собой так, чтобы создавалась чередующаяся полярность полюсов вдоль всей
расточки статора. Такой же принцип построения схемы обмотки статора и порядка
включения вентилей в цепях фаз должен быть и при электромагнитной редукции (при
этом s = 1).
В случае получения нерегулируемой низкой частоты
вращения импульсная система напряжений
может быть сформирована непосредственно от сети переменного тока путем
использования в схеме обмотки неуправляемых вентилей (диодов), которую
предложил В.П. Наний [1].
На рисунке 1 представлен базовый фрагмент для
формирования многофазных обмоток с вентильной коммутацией, который положен в
основу предлагаемой математической модели.
Смысл модели сводится к использованию элементов теории
электрических цепей для определения энергетических соотношений в указанных двигателях
с учетом параметрического характера цепи обмотки фазы.
Рисунок 1 – Базовый фрагмент
для построения многофазных схем обмоток с
вентильной коммутацией
Основные допущения:
1. Изменение индуктивного параметра (индуктивности фаз
в зависимости от углового положения ротора) происходит синхронно с изменением напряжения
сети и зависит только от углового положения ротора (является независимой
функцией времени);
2. Магнитная система слабо насыщена и индуктивные
параметры зависят только от соответствующих магнитных проводимостей рабочего
зазора;
3. Взаимоиндуктивная связь между сосредоточенными обмотками фаз отсутствует;
4. Вентиль считается идеальным;
5. Сеть имеет бесконечно большую мощность.
Закон изменения индуктивного параметра различен для двигателей с электромеханической и электромагнитной редукцией и может быть представлен в следующем виде:
при
электромеханической редукции
|
|
(5) |
при
электромагнитной редукции
|
|
(6) |
где
L0 –
постоянная составляющая индуктивного параметра (как среднее значение);
![]() – относительное
значение амплитуды переменной составляющей зазора;
– относительное
значение амплитуды переменной составляющей зазора;
![]() – среднее значение
амплитуды переменной составляющей воздушного зазора в фазной зоне обмотки;
– среднее значение
амплитуды переменной составляющей воздушного зазора в фазной зоне обмотки;
![]() – среднего значение
зазора в фазной зоне;
– среднего значение
зазора в фазной зоне;
![]() – средние значения
максимального и минимального зазоров в фазной зоне;
– средние значения
максимального и минимального зазоров в фазной зоне;
![]() – коэффициент
основной гармоники индуктивного параметра;
– коэффициент
основной гармоники индуктивного параметра;
αнач – начальная фаза процесса самокоммутации обмотки
фазы.
Учитывая параметрический характер цепи обмотки фазы
для всех названных выше вариантов двигателей и сделанные допущения, дифференциальное
уравнение для фазного тока имеет вид при 0 ≤ t ≤ tотк:
|
|
(7) |
где
R – активное сопротивление обмотки фазы;
um – амплитуда синусоидального напряжения;
αнач – угловая
координата (в электрических градусах)
начала момента коммутации;
tотк –
момент закрытия вентиля.
Однако, как и все дифференциальные уравнения с
переменными коэффициентами, уравнение (7) не имеет аналитического решения,
поэтому задача сводится к преобразованию его к виду, решение которого можно
выполнить, например, методом Рунге-Кутта используя математический пакет MathCAD.
Для варианта двигателей с электромеханической редукцией
после подстановки выражения (5) в (7) и дифференцирования получаем
|
|
|
все
члены уравнения делим на R, а второй
член левой части уравнения умножаем на ![]() . В результате этого получаем:
. В результате этого получаем:
|
|
|
вводя ![]() – характеризует
соотношение постоянных параметров обмотки фазы и = ωt – фазовый угол получаем:
– характеризует
соотношение постоянных параметров обмотки фазы и = ωt – фазовый угол получаем:
![]() .
.
Обозначая ![]() в окончательном виде
дифференциальное уравнение (7) приведено к форме удобной для компьютерного моделирования
при 0 ≤ a ≤ aотк:
в окончательном виде
дифференциальное уравнение (7) приведено к форме удобной для компьютерного моделирования
при 0 ≤ a ≤ aотк:
|
|
(8) |
Для вентильно-индукторного двигателя после подстановки выражения (6) в (7) и дифференцирования получаем
|
|
|
также
деля на R все члены уравнения и
умножая на ![]() второго члена левой части получаем
второго члена левой части получаем
![]() .
.
Обозначая ![]() окончательно получаем
при 0 ≤ a ≤ aотк:
окончательно получаем
при 0 ≤ a ≤ aотк:
|
|
(9) |
где aотк –
фазовый угол момента закрытия вентиля.
Компьютерное решение уравнения (8) или (9) для мгновенного значения фазного тока с учетом (5) или (6) может быть представлено не только в графическом виде (рисунок 2), но и в виде гармонического ряда
|
|
(10) |
где
i0 – постоянная составляющая фазного тока;
ikm –
амплитуда k – ой гармоники фазного тока;
φk – начальная фаза k – ой
гармоники фазного тока.
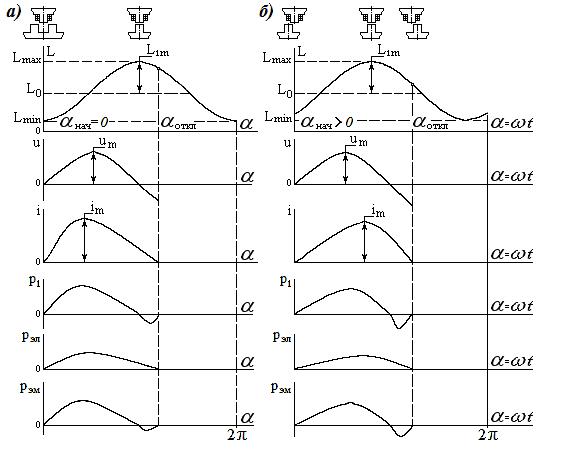
Рисунок 2 – Диаграммы изменения L(), u(), i() и мгновенных значений
потребляемой мощности р1(),
электрических потерь рэл() и электромагнитной
мощности рэм() для вентильно-индукторного двигателя:
а) при нач = 0, что соответствует максимальному моменту;
б) при нач > 0, что соответствует моменту меньше
максимального.
Выражение для фазного тока во второй обмотке i2 (рисунок
1), это тот же ряд гармонических составляющих (10) только с другими начальными
фазами, так как отрицательная полуволна напряжения сдвинута на фазовый угол a = π.
Сложение двух фазных токов позволяет получить
выражение для линейного тока в следующем виде:
|
|
(11) |
где
ikл.m – амплитуда k – ой
гармоники линейного тока;
φkл
– начальная фаза k – ой
гармоники линейного тока.
Анализ выражения (11) показывает, что постоянная составляющая и четные гармоники фазных токов замыкаются внутри схемы обмотки (при этом складываются арифметически), а нечетные гармоники (складываются с учетом начальных фаз токов обоих обмоток) и замыкаются через сеть.
Естественно, рабочей гармоникой линейного тока
является основная, в то время как высшие генерируются в сеть, что является
специфической особенность все силовых схем с элементами силовой электроники.
Действующее значение фазного и линейного токов определяются с помощью выражений:
|
|
(12) |
|
|
(13) |
Потребляемая мощность из сети (например, для схемы в две звезды) будет определяться с помощью выражения
|
|
(14) |
где
![]() – коэффициент
мощности;
– коэффициент
мощности;
![]() – коэффициент
искажения (учитывает наличие высших гармоник в линейном токе);
– коэффициент
искажения (учитывает наличие высших гармоник в линейном токе);
φ1u , φ1i – соответственно, начальные фазы основных гармоник
напряжения и тока.
Электрические потери в обмотках фаз статора тогда будут равны
|
|
(15) |
и
пренебрегая магнитными потерями, получаем выражение для электромагнитной мощности
|
|
(16) |
и
электромагнитного момента
|
|
(17) |
где
ω1 = πn1/30 – синхронная
угловая частота перемещения максимумов МДС.
«Энергетический» КПД, каждого из рассматриваемых двигателей, можно определить как
|
|
(18) |
Представленные в графическом виде на рисунке 2
мгновенные значения фазного тока и мощностей показывают, что продолжительность
его протекания (из-за наличия L0) заметно превышает полпериода. После прохождения
максимума индуктивного параметра (ось полюса статора совпадает с ось полюса
ротора) происходит одновременно два физических процесса:
1. Переход данной обмотки фазы в генераторный режим
работы;
2. «Гашение поля» – вывод запасенной ранее катушкой
обмотки фазы магнитной энергии в сеть (из-за наличия отрицательной полуволны
напряжения).
При самокоммутации опасность перехода в генераторный режим состоит лишь в том, что на этом временном интервале большая часть механической энергии преобразуется и возвращается в сеть за вычетом электрических потерь, что естественно будет снижать степень использования активных материалов.
Величина угла начала коммутации αнач
для каждого из рассматриваемых в статье индукторных двигателей устанавливается
в зависимости от момента нагрузки, то есть при αнач = 0,
когда L(α) = Lmin электромагнитный момент будет имеет максимальное
значение. Если придавать αнач приращения Δα, то
величина электромагнитного момента будет уменьшаться и при αнач =
α0 будет получено значение Рэм =
0, что соответствует "идеальному" холостому ходу. Потребляемая
активная мощность Р1.0 будет покрывать только электрические потери.
Это обстоятельство позволяет для рассматриваемых двигателей в статье ввести понятие
угла нагрузки θ и угловой характеристики Мэм = f(θ) при
изменении αнач
≤ θ ≤ α0. Вид Мэм = f(θ),
величина электромагнитного момента исключительно зависят от параметров ε
(или) mL и tgφ0.
Представленная математическая модель только кажется
сложной, но использование того или иного математического пакета позволяет
получить не только количественную оценку, но и графическое представление происходящих
электрических и электромагнитных процессов в рассматриваемых индукторных
двигателях при вентильной самокоммутации. Особо следует отметить, что введение
понятия угла нагрузки θ при изменяющейся форме фазного тока и его
максимума имеет несколько иной физический смысл, отличный от синхронных машин
классического типа.
Математическая модель удобна не только для задач
анализа, но и для задач синтеза. В техническом задании на разработку того или
иного типа рассматриваемого в статье индукторного двигателя обязательно
указываются полезная мощность Р2н, частота вращения n2,
напряжение питания и частота сети. Отсутствие требований к энергетическим
показателям усложняет задачу синтеза, однако первоначальным ориентиром на КПД и коэффициент мощности могут служить
асинхронные двигатели на мощность до нескольких киловатт с 2р = 4 – 10.
Ориентир на КПД позволяет установить
потери в двигателе (основная их доля в обмотке статора), тем самым без особых
проблем (с учетом m2, N и возможно
s) определить активное cопротивление обмотки фазы R. Дальнейшей задачей синтеза является подбор ε
(или mL) и tgφ0, удовлетворяющих поставленной задаче и воплощению их в
конкретную конфигурацию магнитной системы и количества витков катушек,
образующих обмотку фазы. Для этой цели можно воспользоваться следующими источниками
[2, 3 и 4].
Литература
1. Наний В.П. Электродвигатели с катящимся ротором и
многофазным пульсирующем полем. – Харьков: ХВКИУ, 1967.
2. Алексеева М.М. Машинные генераторы повышенной
частоты. – Л.: Энергия, 1967.
3. Дискретный электропривод с шаговыми двигателями /
Ивоботенко Б.А. и др. Под общ. ред. М.Г. Чиликина. – М.: Энергия, 1971.
4. Кулик Ю.Д. Особенности расчета
вентильно-индукторного двигателя с неуправляемой коммутацией для
вентильно-индукторного привода // Актуальные проблемы энергосберегающих
технологий. Труды Всероссийской научно-технич. конф. с международным участием.
Екатеринбург: ГОУ ВПО УГТУ-УПИ, 2006.
MATHEMATIC MODELS OF SWITCHED-RELUCTANCE MOTORS WITH
PULSE POWER SUPPLY FROM SINUSOIDAL SOURCE
Kulick Y. D., Polyuschenkov I. S.
The
article proposes a mathematical model of low-speed switched-reluctance motor
with pulse power supply directly from sinusoidal electric source. Mathematical
description takes account the parametric nature of winding phase circuit with introduction
of two parameters: relative main component of inductance and ratio of steady
inductance component with resistance of the phase winding. The proposed model
of switched-reluctance motor with electromechanical and electromagnetic
reduction allows to solve engineering problems in analysis and synthesis for
specified motors.
Key
words: concentrated
phase winding, gate switching, electromechanical and electromagnetic reduction,
power efficiency, load angle.
Сведения об авторах:
Кулик Юрий Дмитриевич окончил Электромеханический
факультет МЭИ в 1967 г. Кандидат технических наук, доцент. Защитил кандидатскую
диссертацию по теме «Двигатель с гибким ротором и расщеплённой магнитной системой»
в 1978 г. в МЭИ. Доцент кафедры «Электромеханические системы» филиала МЭИ в г.
Смоленске.
Моб. телефон: 89107145568
Рабочий телефон: (4812) 64-17-92
Полющенков Игорь Сергеевич окончил Смоленский филиал
МЭИ в 2008 г. Кандидат технических наук. Защитил кандидатскую диссертацию по
теме «Разработка бездатчикового вентильно-индукторного электропривода с
искусственной нейронной сетью» в 2013 г. в МЭИ. Старший преподаватель кафедры
«Электромеханические системы» филиала МЭИ в г. Смоленске.
Рабочий телефон: (4812) 64-17-92
Моб. телефон: 89156505419
E-mail:
polyushenckov.igor@yandex.ru
Филиал ФГБОУ ВПО «Национальный
исследовательский университет «МЭИ» в г. Смоленске
Поступила в редакцию 9.01.2014