Математическая
морфология.
Электронный
математический и медико-биологический журнал. - Т. 14. -
Вып. 1. - 2015. - URL:
http://www.smolensk.ru/user/sgma/MMORPH/TITL.HTM
http://www.smolensk.ru/user/sgma/MMORPH/N-45-html/TITL-45.htm
http://www.smolensk.ru/user/sgma/MMORPH/N-45-html/cont.htm
УДК
621.396.962
ОСОБЕННОСТИ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ
исследовательского комплекса с использованием матричной камеры субтерагерцового
диапазона
Ó 2015 г. Астахов С. П., Строев Н. Н., Сулимский Е. C.
В работе рассмотрены основные
требования к программному обеспечению исследовательского комплекса. Предложена реализация
алгоритмов программных средств, обеспечивающих работу оборудования и обработки
потока данных матричной камеры субтерагерцового
диапазона.
Ключевые слова: субтерагерцовый
диапазон, миллиметровые волны, система радиовидения, матричная
камера.
Субтерагерцовый и терагерцовый
диапазоны частот находятся между инфракрасным и СВЧ
диапазонами. Таким образом, эта область перенимает достижения, как из оптики,
так и из СВЧ электроники. На данный момент существует большое количество примеров
и сфер использования этого диапазона частот, и оно постоянно увеличивается.
Так, например, контроль качества изделий без нарушения их целостности[1],
получение спектроскопических характеристик материалов[2], распознавание
химического состава[3]. Это возможно благодаря таким свойствам излучения:
— низкий
уровень затухания сигнала при прохождении через многие материалы;
— уникальные
спектральные характеристики веществ при анализе отраженного
или прошедшего через них сигнала.
О
создание первых двумерных изображений исследуемых объектов было упомянуто в
1995 году[4]. С этого времени было опубликовано большое количество работ по получению
двумерного и трехмерного изображений объектов. И интерес к возможностям радиовидения растет, совершенствуется аппаратная и
технологическая база. Сейчас фирмы могут предложить оптимальные конфигурации
оборудования под каждую конкретную задачу[5].
Для
построения изображения используются данные получаемые с детектора. Детектор для
определенного исследовательского комплекса должен работать с одним из типов источников
излучения:
— генерация
одиночными импульсами с широкой спектральной полосой;
— узкополосное,
непрерывное излучение генератором на основе полупроводниковых или оптических технологий.
У
систем, работающих с сигналами первого или второго типов, есть свои достоинства
и недостатки (табл. 1). Реконструировать двумерное и трехмерное изображения
можно и в первом, и во втором случаях. Будут различаться только применяемые
методы реконструкции.
Таблица
1 — Достоинства и недостатки систем радиовидения
с импульсным и с непрерывным излучением
|
Тип
системы радиовидения |
Достоинства |
Недостатки |
|
Импульсная система |
— большой объем
информации, который можно получить об объекте исследования; — высокая чувствительность |
— громоздкая система; — сложность
восстановления изображения — обычно система
состоит из одного приёмника; — необходима
сложная система сканирования для увеличения разрешения — длительное время
создания изображения |
|
Система
с непрерывным излучением |
— компактность; — стабильность; — возможность
уменьшения времени измерения; — доступны массивы
приёмных ячеек (матричные камеры и т.п.); — простая система
сканирования для увеличения разрешения; — короткое время
создания изображения |
— информацией для
обработки является только уровень сигнала, который приняла приемная ячейка; — малая
чувствительность |
Методы
обработки данных и реконструкции изображений в терагерцовом
и субтерагерцовом диапазонах основываются на
достижениях ранее достигнутых в приложениях рентгеновской компьютерной
томографии. Также есть ряд работ развивающих уже направление терагерцовой компьютерной томографии. В настоящий момент
используются следующие методы реконструкции «радиоизображений»[5]:
— прямые
методы, учитывающие особенности распространения излучения в среде;
— методы,
основанные на преобразование Радона;
— методы,
основанные на теореме о центральном сечении;
— алгебраические
методы;
— стохастические
методы.
В
рассматриваемом исследовательском комплексе[6]применяется источник непрерывного
субтерагерцового излучения и матричная камера (рис.
1), работающие на частоте 98 ГГц. Выходные данные из матричной камеры в
оцифрованном виде должны быть переданы в компьютер для обработки. Используемый
интерфейс USB
2.0 работает в режиме, обеспечивающем скорость потока данных до 12 МБит/с, что достаточно для получения массива данных в режиме
Real Time. Однако драйвер
устройства, обеспечивающий системную интеграцию в ОС Windows, должен обеспечивать
определенный уровень сервиса. Версия драйвера, предложенная разработчиком
оборудования, не полностью отвечает данному требованию. Поэтому нами была проведена
разработка необходимого драйвера. Из массива точек, полученного с матричной камеры,
необходимо восстановить двумерное или трехмерное изображение объекта. Для этого
требуется следующий уровень программного обеспечения, реализующего
математические методы обработки и адаптацию аппаратуры к условиям применения. В
связи с этим следует добиваться максимального количества информации для
описания каждой точки сцены. Каждый
пиксель камеры характеризуется только уровнем сигнала, который он улавливает,
причем характеристики приемных датчиков не обладают полной идентичностью. Таким
образом, для решения задачи получения двух и трехмерного «радиоизображения»,
необходимо использовать усовершенствованную квазиоптическую систему управления
освещением (рис.1). Синхронизируя работу системы с обработкой потока данных
матричной камеры, нам удалось обеспечить условия для получения дополнительной
информации для восстановления двухмерного изображения наблюдаемой сцены. Зеркальные
отражатели, направленные на объект имеют функцию микросканирования,
что расширяет глубину рассматриваемой сцены. Остальное оборудование описано в [6].
При
разработке антенной и квазиоптической системы освещения мы стремились к
обеспечению монохроматического потока с плоским фронтом волны. Это было достигнуто
совершенствованием антенной системы источника, скорректированная диаграмма излучателя
приведена на рис. 2.
Рисунок
1 — Схема экспериментального комплекса
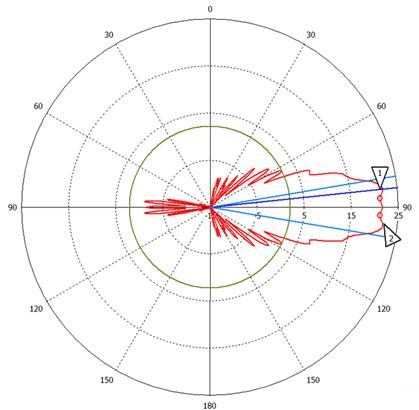
Рисунок
2 — Диаграмма направленности антенны излучателя:
маркер
№ 1 — 87 градусов, коэффициент усиления 21.07 дБ
маркер
№ 2 — 92.78 градусов, коэффициент усиления 21.1 дБ
Как
уже отмечалось, поставляемое первичное программное обеспечение (ПО) для ознакомления с комплексом[6]
имеет ряд существенных недостатков, снижающих возможность для проведения
серьезных исследовательских работ:
— неэффективная
обработка получаемого с камеры потока данных;
— отсутствие
автоматической регулировки диапазона чувствительности приемных ячеек;
— обработка
массива точек дифракционной картины при помощи стандартных методов
обработки изображений видимого диапазона длин волн;
— малая
скорость быстродействия ПО при
чтении USB буфера
на малых значениях выдержки и возможность прерывания потока.
Поэтому
было принято разработать собственное программное обеспечение для данного комплекса.
Для этого, кроме разработки драйвера, потребовалось провести апробацию
математических методов обработки, выбрать методы возможные для реализации на
данном оборудовании, сформировать алгоритм и структуру программного комплекса.
Задачами
разработки программного обеспечения являются:получение оцифрованной дифракционной картины
изучаемой сцены с учетом шумов и неоднородности пикселей, обработка информации
для восстановления внешнего вида наблюдаемых объектов в режиме потока реального
времени. Также изучить возможность и наметить пути получения сверхразрешения и формирования пространственных изображений[7].
Данное
программное обеспечение можно разделить на 4 части:
1. Драйвер
матричной камеры.
2. Формирование
потокового видео с камеры.
3. Восстановление
изображения объекта по массиву точек дифракционной картины.
4. Адаптационные
алгоритмы калибровки комплекса.
Драйвер
матричной камеры обеспечивает: управление камерой, получение необработанного
массива данных с ячеек камеры, предоставляет функции для реализации адаптивных
алгоритмов управления комплексом.
Ниже
приведен алгоритм инициализации камеры:
1.
Загрузка в память dll драйвера контроллера.
2.
Открытие порта.
3.
Первичная инициализация, при
необходимости запись в память контроллера прошивки.
4.
Проверка соответствия записанной во флэш память
программы, при необходимости запись её во флэш память.
5.
Установка выдержки. Запись требуемых
параметров.
После
инициализации камера готова к запросам на чтение данных.
Формирование
потокового видео, применимо к данной задаче, необходимо для обработки данных с
камеры в режиме реального времени. Для этого нужно, чтобы ПО
было многопоточным. Потоки выделены на следующие цели:
— чтение
буфера обмена данных с камеры и формирование изображений, состоящих из массива
точек дифракционной картины;
— обработка
изображений, восстановление изображения объекта;
— выполнение
команд, изменяющих режим работы камеры;
— вывод
изображения;
— работа
пользовательского интерфейса.
Для
нейтрализации действия шумов и корректировки неравномерности пикселей предложен
адаптивный алгоритм калибровки:
1.
Инициализация камеры.
2.
Выключение излучателя.
3.
Чтение неоткалиброванного
изображения с камеры.
4.
Сохранение эталонного массива 1.
5.
Включение излучателя.
6.
Сохранение эталонного массива 2.
7.
Выравнивание динамического диапазона
ячеек матричной камеры путем сравнения текущего изображения с изображением с
выключенным излучателем.
8.
Сохранение таблицы корректировки для
параметрической настройки чувствительности.
Данный
алгоритм повышает чувствительность камеры,позволяет
зафиксировать уровень естественного шума, проводить нормализацию с учетом неоднородности
параметров датчиков матрицы, адаптироваться к условиям освещения.
Работа
по созданию программного комплекса пока не завершена, но уже достигнуты
определенные результаты.
1.
Проведен анализ структуры ПО,
детализированы задачи разработки.
2.
Разработаны алгоритмы управления
исследовательским комплексом.
3.
Проведен обзор возможностей методов восстановления
двумерного и трехмерного изображений.
4.
Выбраны методы математической
обработки «радиоизображений».
Литература
1. Zhong, H., et
al., Nondestructive defect identification with terahertz time-of-flight tomography.
IEEE Sensors Journal, 2005. 5(2): p. 203-208
2. Ueno, Y. and K. Ajito, Analytical terahertz spectroscopy. Analytical Sciences, 2008. 24(2): p. 185-192
3. Fischer, B., et
al., Chemical recognition in terahertz time-domain spectroscopy and imaging.
Semiconductor Science
and Technology, 2005. 20(7): p. S246-S253
4. Hu, B.B. and
M.C. Nuss, Imaging with terahertz waves. Optics Letters, 1995. 20(16): p. 1716
5. J. P. Guillet, B. Recur, L. Frederique, B. Bousquet,
L Canioni, I. Manek-Hönninger,
P. Desbarats, Review of Terahertz Tomography
Techniques. Journal of Infrared,
Millimeter and
Terahertz Waves
35, 382, 2014
6. Строев
Н. Н., Сулимский Е. C. Организация исследовательского
комплекса с использованием матричной камеры субтерагерцового
диапазона. - Математическая морфология. Электронный математический и медико-биологический
журнал. - Т. 13. -
Вып.
4. - 2014. [Электронный ресурс]. Режим доступа URL: http://www.smolensk.ru/user/sgma/MMORPH/N-44-html/cont.htm
7. Пирогов
Ю.А., Гладун В.В., Тищенко Д.А., Тимановский
А.Л., Шлемин И.В, Джен С.Ф.
Сверхразрешение в системах радиовидения
миллиметрового диапазона // Журнал радиоэлектроники - 2004. - №3 [Электронный ресурс]. Режим доступа URL: http://jre.cplire.ru
FEATURES
OF THE SOFTWARE for desiGN of RESEARCH COMPLEX USING SUBTERAHERZ MATRIX CAMERA
Stroev N. N., Sulimski Е. S.
The article highlights the basic requirements for software research
complex. The proposed implementation of software algorithms
that provide working of equipment and processing of data stream from the subterahertz matrix camera.
Key words: subteraherz
range, millimeter waves, radiovision
system, matrix camera.
Филиал ФГБОУ ВПО «Национальный
исследовательский университет» МЭИ» в г. Смоленске;
ЗАО «НИИ СТТ» г. Смоленск
Поступила в
редакцию 13.03.2015.