Математическая
морфология.
Электронный
математический и медико-биологический журнал. - Т. 14. -
Вып. 4. - 2015. - URL:
http://www.smolensk.ru/user/sgma/MMORPH/TITL.HTM
http://www.smolensk.ru/user/sgma/MMORPH/N-48-html/TITL-48.htm
http://www.smolensk.ru/user/sgma/MMORPH/N-48-html/cont.htm
УДК
623.4
УМЕНЬШЕНИЕ
ВРЕМЕНИ АДАПТАЦИИ КАЛМАНОВСКОГО ФИЛЬТРА
Ó 2015 г. Савицкий Ф. Л., Давиденко О. А., Боханкова Т. А.
В работе представлено обоснование нового способа,
позволяющего уменьшить время оптимизации параметров фильтра Калмана.
Практическая значимость работы состоит в возможности реализации
нового способа уменьшения времени оптимизации параметров фильтра Калмана в интересах автомобилестроения при создании
перспективных автомобилей, интегрирующих в себе различные интеллектуальные системы.
Ключевые слова: фильтр Калмана,
коэффициент усиления, ковариационная матрица, оценка.
Огромное внимание в современном автомобилестроении уделено вопросу
обеспечения максимальной безопасности при вождении автотранспорта. В связи с
этим автопроизводители непрерывно разрабатывают и
постоянно совершенствуют технологии, которые делают автомобили безопасными
комфортабельными.
Главным направлением современной эволюции в автомобилестроении является
интеллектуализация автомобилей, которое позволит реализовать переход
управленческих функций от внешней системы (человека) к внутренней (встроенной)
подсистеме самой техники.
В связи с ростом дорожно-транспортных происшествий особый интерес
проявляется к интеллектуальным системам оповещения аварийной ситуации.
Для опознавания аварийной ситуации, интеллектуальная система определяет
координаты и параметры движения автомобилей, прогнозирует траектории движения и
анализирует их на предмет возникновения аварии.
В связи с отсутствием возможности точного измерения координат автомобиля
интеллектуальная система не может качественно оценить дорожную ситуацию на
предмет угрозы столкновения.
Учитывая, что
ошибки измерения имеют шумовой характер, то для оптимального оценивания
параметров сигнала по зашумленным измерениям целесообразно использовать фильтр Калмана. Однако длительное время установления параметров
фильтра к оптимальному значению является его недостатком при оценке
интеллектуальными системами ситуации на дороге, что связано с высокой динамикой
движения. В связи с этим, решение задачи минимизации времени
оптимизации параметров фильтра Калмана
является актуальной.
Для определения
аварийной ситуации современные интеллектуальные системы решают задачу
определения точки встречи двух движущихся объектов, при этом зашумленные данные
о координатах и параметрах движения автомобилей в значительной степени влияют
на ее решение.
На рисунке 1
иллюстрируется ситуация, когда автомобиль А2 движется
на встречу автомобиля А1, создавая угрозу аварийной ситуации. Так как
измеренные данные о координатах и параметрах движения зашумлены, то
интеллектуальная система ошибочно прогнозирует траекторию движения автомобиля А2, а новые измеренные данные приводят к тому, что траектория
значительно изменяется. При этом интеллектуальная система не может принять
решения о возникновении угрозы.
Рисунок 1 –
Иллюстрация варианта оценки интеллектуальной системой
аварийной
ситуации без оптимальной обработки измеренных данных
Применение
алгоритмов Калмановской фильтрации позволяет
оптимизировать измеренные данные за счет уменьшения в них шумовой составляющей.
Алгоритм
дискретного линейного фильтра Калмана выглядит
следующим образом [1].
Предсказание
состояния системы:
![]()
где
![]() –
координаты и проекция скорости на соответствующие координатные оси;
–
координаты и проекция скорости на соответствующие координатные оси;
 –
матрица перехода, где dt – время обновления
данных;
–
матрица перехода, где dt – время обновления
данных;
![]() – вектор шума системы.
– вектор шума системы.
Предсказание
ошибки ковариации:
![]()
где
![]() – ковариационная матрица
– ковариационная матрица ![]() ;
;
Уравнение
измерения:
![]()
где
![]() – вектор измерений;
– вектор измерений;
 –
матрица измерений;
–
матрица измерений;
![]() – вектор ошибок измерений.
– вектор ошибок измерений.
Начальные
условия и другие предположения:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
где
![]() – операция определения условного
математического ожидания;
– операция определения условного
математического ожидания;
![]() – прогнозируемая оценка на 0-м шаге;
– прогнозируемая оценка на 0-м шаге;
![]() – ошибка оценки;
– ошибка оценки;
![]() – ковариационная матрица
– ковариационная матрица ![]() ;
;
![]() – ковариационная матрица
– ковариационная матрица ![]() ;
;
![]() – ковариационная матрица
– ковариационная матрица ![]() .
.
При наблюдении:
вычисление усиления Калмана:
![]() ;
;
обновление оценки с учетом измерения:
![]() ;
; ![]() ;
;
обновление ошибки ковариации:
![]() ,
,
где
![]() – уточненная оценка;
– уточненная оценка;
![]() – прогнозируемая оценка;
– прогнозируемая оценка;
![]() – коэффициент усиления Калмана.
– коэффициент усиления Калмана.
Для реализации
рекуррентной процедуры фильтрации на основании априорной информации
определялись оценка состояния ![]() и ковариационная
матрица ошибки оценивания
и ковариационная
матрица ошибки оценивания ![]() .
.
На рисунке 2
представлена иллюстрация оценки координат и параметров движения автомобиля А2 с использованием алгоритма Калмановской
фильтрации. Так как работа фильтра Калмана носит
итерационный характер, то для оптимизации параметров фильтра требуется
определенное время. В связи с этим возможна ситуация, когда на предотвращение
аварийной ситуации времени останется недостаточно.
Рисунок 2 –
Иллюстрация варианта оценки интеллектуальной системой
аварийной
ситуации при оптимальной обработке измеренных данных
Можно
предположить, что минимизация времени адаптации параметров фильтра обеспечит
своевременное обнаружение аварийной ситуации и позволит предотвратить угрозу
столкновения автомобилей.
Целью научной
работы является минимизация времени оптимизации параметров Калмановского
фильтра для обеспечения качественной и своевременной фильтрации входных
воздействий в интересах повышения эффективности
функционирования интеллектуальных систем автомобиля во время его
движения.
Принимая во
внимание рекуррентный характер функционирования фильтра Калмана
справедливо предположить, что если адаптацию параметров фильтра осуществлять
заблаговременно, то к моменту обработки входных данных они будут оптимизированы
под входное воздействие. Рисунке 3 иллюстрирует
рассмотренный подход.
Рисунок 3 –
Иллюстрация возможности сокращения времени
адаптации
параметров фильтра Калмана за счет оптимальной
обработки
прогнозируемых отсчетов
Способ реализации
данного подхода заключается в подаче на вход фильтра прогнозируемых «назад»
данных с учетом априорной оценки текущего положения автомобиля и оценки
характеристик мешающих воздействий.
Расчет начальной
прогнозируемой координаты необходимо осуществлять, опираясь на гипотезу
прямолинейного движения автомобиля. Из множества начальных координат,
удовлетворяющих прогнозу, целесообразно использовать координаты, соответствующие
движению автомобиля в аварийном направлении, что оправдано в интересах интеллектуальных
систем, обеспечивающих своевременное оповещение об
возникновении аварийной ситуации.
Для проверки
работоспособности предлагаемого способа было проведено имитационное
моделирование в среде Simulink.
Рассматривалась
прямолинейная аварийная траектория движения автомобиля (рисунок 4). Начальные
координаты равны (500, 500, 0), скорость движения составляет 140 км/ч (≈ 40 м/с),
что соответствует движению автомашин на встречу друг другу со скоростью 70
км/ч.
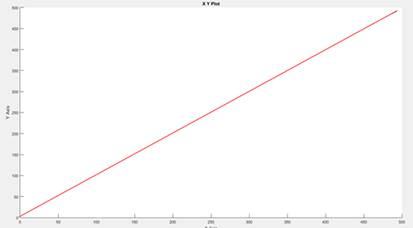
Рисунок 4 – Траектории
движения автомобилей
Предполагается,
что датчики интеллектуальной системы оповещения о возникновении аварийной
ситуации определяют пространственные координаты автомобиля, а также радиальную
скорость. Ошибки измерения координат имеют случайный характер. Наличие шумов
измерения в модели обеспечивается добавлением шумовой компоненты, распределенной
по нормальному закону и имеющее СКО=7м по пространственным координатам.
Оценим работу
фильтра Калмана с учетом того, что в фильтре заложена
модель прямолинейного движения объекта в пространстве. Ниже представлены
результаты моделирования.
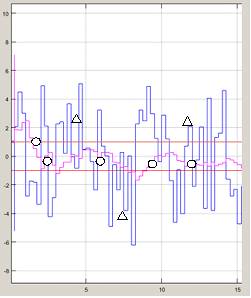
Рисунок 5 –
Результаты имитационного моделирования
![]()
![]() ( –
ошибки измерения; – ошибки
оценивания):
( –
ошибки измерения; – ошибки
оценивания):
На рисунке 5
представлены ошибки измерения и ошибки оценивания входных данных. Результаты
моделирования позволяют наблюдать увеличение точности оценивания параметров по
зашумленным измерениям, что подтверждает адаптивный характер реакции фильтра Калмана на входное воздействие.
В результате
статистического моделирования были получены значения среднеквадратической
ошибки оценивания параметров сигнала на каждом шаге его работы (рисунок 6). Из
результатов статистического моделирования видно, что при фильтрации входных
воздействий фильтр адаптирует свои параметры в течении
20-ти отсчетов, что по времени составляет 5 с.
Учитывая, что
скорость сближения автомобилей составляет 40м/с, то за время адаптации фильтра
автомашины пройдут 200 м, что составляет треть дистанции.
В течении прохождения автомобилями оставшейся части дистанции,
интеллектуальная система оповещения о возникновении аварийной ситуации должна
проанализировать оцененные данные, выработать команды оповещения об угрозе
столкновения, а человек должен воспринять сигнал выдаваемой системой, оценить аварийную
ситуацию и отреагировать на нее. Присутствие человеческого фактора в действиях
по предотвращению столкновения требует максимизировать время, отводимое для
реакции человека на аварийную ситуацию, что может быть обеспечено за счет уменьшения времени адаптации параметров фильтра Калмана.
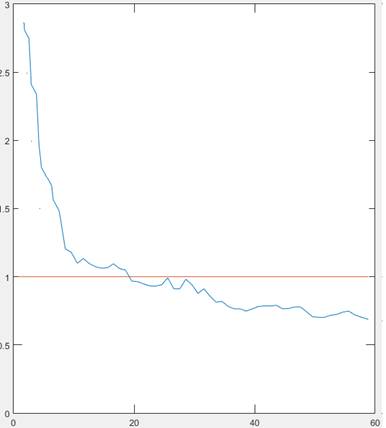
Рисунок 6 –
Среднеквадратической ошибки оценивания
параметров алгоритмами Калмановской фильтрации:
Оценим работу Калмановского фильтра при реализации способа уменьшения времени
адаптации параметров фильтра путем предварительной подачи
на его вход прогнозируемых «назад» данных с учетом априорной оценки текущего
положения автомобиля и оценки характеристик мешающих воздействий. Исходные
данные для моделирования использовались прежние. Ниже представлены результаты
моделирования.
На рисунке 7
представлены ошибки измерения и ошибки оценивания входных данных фильтром Калмана при реализации рассматриваемого способа.
Сравнительный анализ результатов моделирования представленных на рисунках 5 и 7
позволяет сделать вывод о сокращении времени адаптации параметров фильтра.
Результаты
статистического моделирования представлены на рисунке 8. Сравнительный анализ
статистических данных полученных при моделировании работы Калмановского
фильтра в обычном режиме и с использованием предлагаемого способа позволяет
судить о работоспособности последнего, что позволяет своевременно обеспечить
требуемый уровень среднеквадратических ошибок оценивания параметров зашумленных
измерений в интересах повышения эффективности работы
интеллектуальных систем автомобиля обеспечивающих безопасность дорожного
движения.
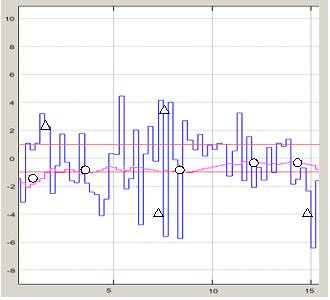
Рисунок 7 –
Результаты имитационного моделирования с учетом
![]()
![]() гипотезы ( –
ошибки измерения ; – ошибки оценивания):
гипотезы ( –
ошибки измерения ; – ошибки оценивания):
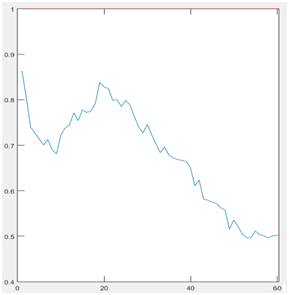
Рисунок 8 –
Результаты статистического моделирования
Теоретическая
значимость работы заключается в обосновании нового способа, позволяющего
уменьшить время оптимизации параметров фильтра Калмана.
Практическая
значимость работы состоит в возможности реализации нового
способа уменьшения времени оптимизации параметров фильтра Калмана в интересах автомобилестроения при создании
перспективных автомобилей, интегрирующих в себе различные интеллектуальные
системы.
Литература
1. Зайцев Г. Ф. Теория инвариантности
и комбинированное управление в автоматических системах. Киев, КВИРТУ, 1961.
62 с.
2. Первачев С. В. Радиоавтоматика. М.,
Радио и связь, 1982. 296 с.
3. Авласенок А. В. Спец.
тема: Дис. ... канд. техн.
наук. Смоленск. ВА ПВО СВ РФ, 1994. 226 с.
4. Гимаров В.А., Дли М.И., Круглов В.В. Задачи распознавания
нестационарных образов //Известия Российской академии наук. Теория и
системы управления. 2004. № 3. С. 92-96.
5. Дли М.И., Какатунова Т.В.
Нечеткие когнитивные модели региональных инновационных систем // Интеграл.
2011. № 2. С. 16-18.
6. Бояринов Ю.Г., Борисов В.В., Мищенко В.И., Дли М.И.
Метод построения нечеткой полумарковской модели функционирования сложной
системы // Программные продукты и системы. 2010. № 3. С. 26.
7. Гимаров В.А., Дли М.И., Битюцкий С.Я.
Нейро-нечеткий метод классификации объектов с
разнотипными признаками //Системы управления и информационные технологии. 2004.
Т. 16. № 4. С. 13-18.
8.
Бояринов Ю.Г.,
Стоянова О.В., Дли М.И. Применение нейро-нечеткого
метода группового учета аргументов для построения моделей социально-экономических
систем // Программные продукты и системы. 2006. № 3. С.
Adaptation time decrease of the kalman
filter
Savitsky F. L., Davidenko O. A., Bohankova T. A.
In the paper presents the new method justification that allow to decrease parameter optimization
time of the Kalman filter. The work practical
importance consist in the new method feasibility of optimization time decrease
of the Kalman filter in the interests of automobile
production in dream car creation, integrating inside different intelligent
system.
Key words: Kalman filter,
gain, covariance matrix, estimation.
Военная академия войсковой
ПВО
Вооруженных Сил Российской
Федерации
имени Маршала Советского Союза А.М.
Василевского
(ВА ВПВО ВС
РФ)
Поступила в редакцию
5.11.2015.