Математическая морфология.
Электронный математический и
медико-биологический журнал. - Т. 10. -
Вып. 2. - 2011. - URL:
http://www.smolensk.ru/user/sgma/MMORPH/TITL.HTM
http://www.smolensk.ru/user/sgma/MMORPH/N-30-html/TITL-30.htm
http://www.smolensk.ru/user/sgma/MMORPH/N-30-html/cont.htm
УДК
551.521+681.7
О МЕТОДЕ УЧЕТА
ПОГРЕШНОСТЕЙ ДВИЖЕНИЯ ОБЛАЧНОСТИ ПО ПОЛУСФЕРИЧЕСКИМ ИЗОБРАЖЕНИЯМ СКАНИРУЮЩЕГО
РАДИОМЕТРА В ДИАПАЗОНЕ 8-13 МКМ
Ó
2011 г. Алленов М. И., Третьяков Н. Д., Фёдоров В. О., Якименко И. В.
В данной работе рассмотрены некоторые погрешности сканирующих низкотемпературных
радиометров при регистрации движущихся объектов (облачных полей) и определении
балла облачности. Приведены количественные оценки возможных погрешностей и предложены
способы их устранения.
Ключевые слова: низкотемпературный радиометр,
собственное излучение, погрешность, балл, облачность, направление, скорость,
движение.
Оценка форм и балла
облачности является чрезвычайно важной задачей, т.к. именно они определяют
количество приходящей (коротковолновой) Солнечной радиации и противоизлучения,
то есть облака непосредственно влияют на радиационный баланс планеты, а,
следовательно, и на климат в глобальном масштабе. Но это важно и для целого
ряда прикладных задач – в сельском хозяйстве, где урожайность зависит от
освещенности, или в авиации – для аэродромных служб форма, балл и направление
движения облачности – важные характеристики в навигации. К сожалению, до сих
пор определение этих характеристик производится субъективно, а в ночное время –
вообще не производится. В ГУ «НПО «Тайфун» разработана автоматизированная
система параметризации и распознавания форм облачности (АСПРФО) [1, 2] которая в
отличие от использованных ранее приборов, позволяет оперативно, а в перспективе
– в реальном масштабе времени получать объективную информацию о форме и
количестве облачности. Она представляет собой низкотемпературный радиометр,
объединенный со сканирующей системой, которая содержит охлаждаемый приемник
излучения на основе KdHgTe, который находится в фокусе двухкомпонентного зеркального
объектива Кассегрена. Перед объективом установлена маска модулятора и далее
модулятор с таким же числом лопастей. Частота вращения модулятора перестраиваемая.
Промодулированный сигнал с приемника поступает на предусилитель, масштабный
усилитель, двухполупериодный синхронный детектор, фильтр нижних частот и далее
на аналоговый вход АЦП платы сопряжения ЛА70М4 с РС. Управление шаговыми
двигателями сканирующей системы осуществляется персональным компьютером. Обмен
командами происходит через цифровые входы (выходы) платы ЛА70М4 и блок управления.
Сканирующее зеркало
совершает полный оборот вокруг своей оси за время 1,8 сек, т.е. полное круговое
сканирование по альмукантарату осуществляется за 1,8 секунду. За это время
регистрируется 360 значений энергетической яркости облачного поля через каждый
градус. После завершения записи данных, зеркало меняет угол наклона на 20,
цикл повторяется. После следующего оборота угол меняется еще на два градуса.
Через заданное количество шагов (строк), в данном случае 17, сканирующее зеркало
возвращается в исходное начальное положение (максимальное значение зенитного
угла - 62о), цикл повторяется и записывается следующий кадр. Таким
образом, мы получаем набор матриц, в каждой, из которой 360*17 значений. Каждое
из 6120 значений представляет собой конкретную область на небесной сфере.
Каждый кадр представляет
собой матрицу значений энергетической яркости облачного поля.
Можно представить этот кадр
в виде проекции облачного поля на горизонтальную плоскость. Затем на эту
проекцию условно накладывается сетка [3]. Узлам сетки присваивается значение
геометрически ближайшего элемента матрицы. Чем больше размерность сетки, тем
точнее будет изображение кадра. Максимальная точность ограничивается разрешающей
способностью радиометра по азимутальному (CD), либо по зенитному (AB) углам
(рис. 1).
Рис. 1. Геометрия двух
последних колец сканирования. AB и CD – минимальное значение
зенитного и азимутального углов соответственно. Н – высота нижней границы
облачности.
Рассчитаем значения отрезков AB И CD:
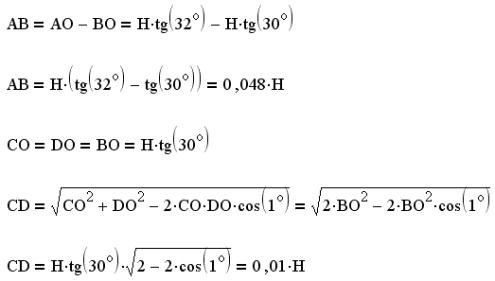
Из приведённых выше расчётов
видно, что отрезок СD меньше отрезка AB. Таким образом, минимальный размер
одной ячейки матрицы (l) задаётся значением:
l = 0,01·H
Ширина всей сетки облачного
поля равна ширине области сканирования или диаметру первого кольца
сканирования. Зенитный угол первого кольца сканирования равен 62о.
При этом диаметр этого кольца равен:
Dmax = 2·H·tg(62o) = 3,761·H
Зная ширину сетки и размер
ячейки, найдём количество ячеек по вертикали и горизонтали, необходимое для
максимально чёткого отображения измерений облачного поля:
Nmin = [Dmax/l] = 377
Квадратные скобки обозначают
округление до большего целого числа. Как видно из последней формулы,
размерность сетки при максимально точном изображении не зависит от высоты нижней
границы облачного поля и равна 377×377 ячеек. Однако такое больше число
ячеек значительно замедлит обработку кадра, поэтому используется сетка
40×40 ячеек, при которой размер одной ячейки равен расстоянию между 16-м
и 17-м кольцом сканирования (AB на рис. 1).
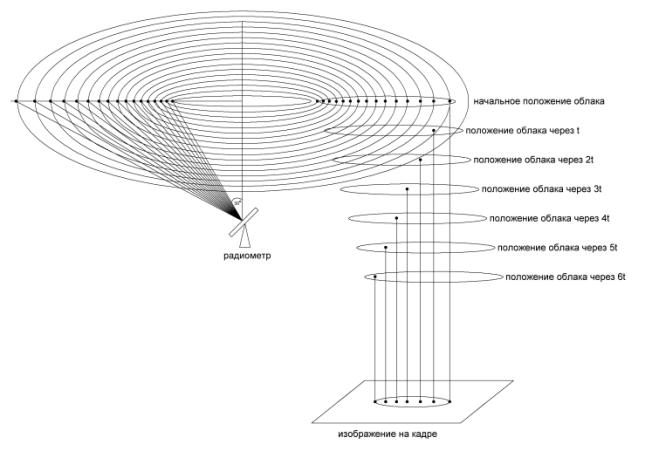
Рис. 2. Принцип измерения
радиометром АСПРФО движущегося объекта.
Поскольку сканирование
объекта (в данном случае облака) происходит не мгновенно, изображение на кадре
не совсем достоверно. Предположим, для второго зенитного угла (зенитный угол 60о)
регистрируется облако, движущееся вправо (рис. 2). Положение облака в этот
момент примем за начальное. Обозначим интервал времени между зенитными измерениями
радиометра как t. Тогда на третьем зенитном угле облако будет измерено в новом
положении, смещённом за время t от начального. Последний раз радиометр зафиксирует
облако на 8 зенитном угле. По начальному положению облака видно, что оно должно
фиксироваться 14-ми кольцами зенитных
углов, однако, в связи с собственным движением, облако будет измерено в течение
меньшего числа зенитных углов. В итоге изображение на кадре получится сжатым. При
движении облака в противоположную сторону, его изображение окажется растянутым.
Отсюда следует, что при сканировании радиометром
движущихся объектов, их изображения получаются искажёнными.
Для оценки этого искажения, в
среде MathCad была создана программа,
которая моделирует работу радиометра и движение облака. Модель радиометра строилась в соответствии со
сканирующим радиометром АСПРФО:
- В течение одного кадра
радиометром фиксируется 6120 значений. (360×17)
- Первый оборот проходит по
наибольшему зенитному углу сканирования. С каждым последующим оборотом зенитный
угол уменьшается.
- Время одного измерения - 4,9
мс. Время регистрации кадра – 30 с.
- Направление вращения
сканирующего зеркала по часовой стрелке.
Зададим в модели круглое
облако, движущееся со скоростью 10 м/c на высоте 1 км в южном
направлении. На рис. 3а – исходное облако, на рис. 3б – искажённое изображение
облака.
а б
Рис. 3. а – истинное
изображение облака, б – искажённое изображение облака.
Из рис. 3а облако растянуто
в сторону своего движения, т. е. имеет большую площадь, чем реальное облако,
что вызовет погрешность при определении балла облачности АСПРФО.
Главным фактором искажений в
модели является ячейковая скорость облака и её направление. При движении облачного
поля перемещается и его проекция на координатной сетке. Количеством ячеек сетки,
пройденных проекцией облачного поля за секунду, определяется его ячейковая
скорость.
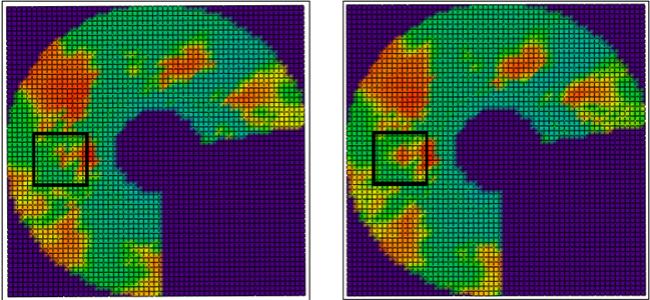
Скорость облачного поля
определяется по двум соседним кадрам (рис. 4). Предварительно, нулевым
значениям кадра, находящимся в зоне сканирования радиометра, присваиваются
среднее значение по соседним элементам. Черной рамкой на кадрах 4а, 4б
(10×10 ячеек) обозначены области, по которым определяется скорость.
а
б
Рис. 4. Два соседних кадра,
используемых для определения скорости облачного поля.
На кадре 4а в пределах
области, ограниченной рамкой, находиться фрагмент облачного поля. На кадре 4б
тот же фрагмент облачного поля, но смещенный за время одного кадра (30 с.). Для
определения скорости облачного поля, необходимо определить горизонтальную и
вертикальную составляющие смещения этого фрагмента. Т.е. требуется определить
на какое количество ячеек нужно сместить отмеченную нами область по вертикали и
горизонтали относительно кадра 4б, чтобы в ней вновь отобразился фрагмент соответствующий
кадру 4а. Задаётся максимально возможное смещение облачного поля в ячейках d,
которое определяет максимальную скорость. Границы области выбираются так, чтобы
при их смещении в любую сторону на максимальное значение d,
ограничиваемый ими участок целиком лежал в рабочей зоне кадра. Затем область на
кадре 4б сдвигается по всем возможным вертикальным и горизонтальным
направлениям от одной ячейки до максимального смещения d. Элементы кадра 4б внутри смещённой
области вычитаются из соответствующих элементов отмеченной области кадра 4а.
Полученные разности суммируются по модулю.
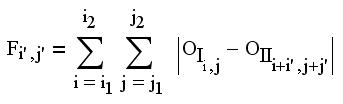
OIi,j, OIIi,j
– элементы внутри ограниченной области кадра 4а и 4б соответственно; i', j' – все возможные смещения от
- d до + d; i1, i2 – границы области по
вертикали; j1, j2 – границы области по
горизонтали; F - матрица сумм абсолютных разностей для всех возможных смещений.
Минимальный элемент матрицы соответствует наиболее вероятному смещению (i'o,
j'o) фрагмента. Зная временной интервал T между
двумя соседними кадрами, определяются горизонтальные (υ) и вертикальные (u) составляющие
ячейковой скорости:
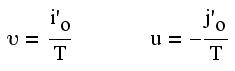
Знаки перед выражениями определяются
выбором направления скорости. Знак минус перед дробью означает, что порядковый
номер i увеличивается сверху вниз. По найденным составляющим определяется
полная ячейковая скорость облачного поля:
![]()
Точность определения ячейковой скорости определяется
значением минимального элемента матрицы F. Относительную погрешность определения скорости
можно рассчитать по формуле:
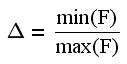
Где min(F) и max(F) – значение минимального и
максимального элемента матрицы.
Скорость
определена успешно, если погрешность не превышает 20%.
Угол α отклонения вектора полной
скорости ν от горизонтали рассчитывается как:
Ячейковая скорость облачного
поля связана с его абсолютной скоростью следующей формулой:
где, V- заданная в м/c
абсолютная скорость облака, а l - размер ячейки, который линейно зависит от
высоты облака Н и от выбранного количества ячеек. Поэтому ячейковая скорость
прямо пропорциональна абсолютной скорости облака и обратно пропорциональна его
высоте (k – коэффициент пропорциональности). Для
изображённого на рис. 3б примера ячейковая скорость облака (ν) равна 0,211
ячейки/c, размерность сетки 40×40 ячеек. Это соответствует движению облака
со скоростью 10 м/c на высоте 1000 м (размер ячейки (l) – 47,5 м), или со
скоростью 20 м/c на высоте 2000 м (размер ячейки (l) – 95 м). В таблице 1
показано как изменяется площадь изображения облака в зависимости от его ячейковой
скорости и направления движения α (α-угол отклонения направления
движения облака от оси X (рис.3б), в градусах ).
![]()
![]()
![]()

Таблица 1.
Значения искажений площади изображения в процентах от реальных значений.
Ячейковая скорость ν в м/c.
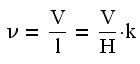
На основе этой таблицы на
рис. 5 изображены графики для четырёх значений ячейковых скоростей (0 – жёлтой
линией, 0,1 – синей, 0,2 – зелёной, 0,4 - красной), иллюстрирующие зависимость
изменения площади изображения облака от направления движения.
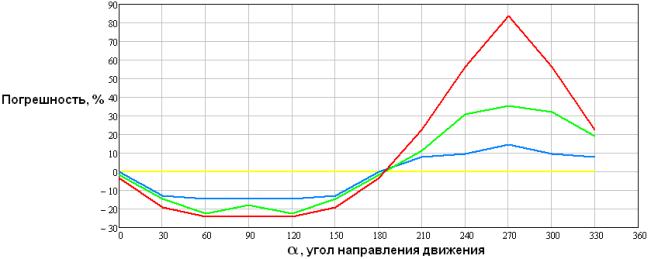
Рис.
5. Графики зависимости погрешности в площади изображения облака от угла
его направления движения.
Были рассчитаны изменения
площади изображения модельного круглого облака, для другого пространственного
положения (рис. 6). Результаты расчётов приведены в таблице 2, а их графическая
интерпретация на рис. 7.
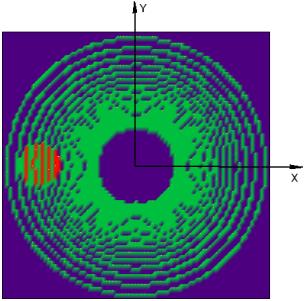
Рис. 6. Другое
пространственное положение облака в начале записи кадра.
![]()

Таблица 2. Значения
искажений площади изображения в процентах от реальных значений.

Рис. 7. Графики зависимости
погрешности в площади изображения облака от направления движения.
Из таблицы 1 следует, что
при некоторых неблагоприятных условиях погрешность может достигать 83 %!
Один из способов исключения
искажений и восстановления истинной картины измерений – их учёт при
математической обработке кадра и соответствующая поправка на скорость. При
восстановлении кадра с поправкой на скорость нужно знать горизонтальные и
вертикальные составляющие скорости движения облачного поля (υ, u), а также время одного измерения τ. Для n-го
измерения соответствующие сдвиги по вертикали и горизонтали рассчитываются
следующим образом:
Полученные значения округляются
до ближайшего целого числа, которое определяет, необходимый сдвиг в ячейках по
вертикали и горизонтали соответствующего элемента кадра.
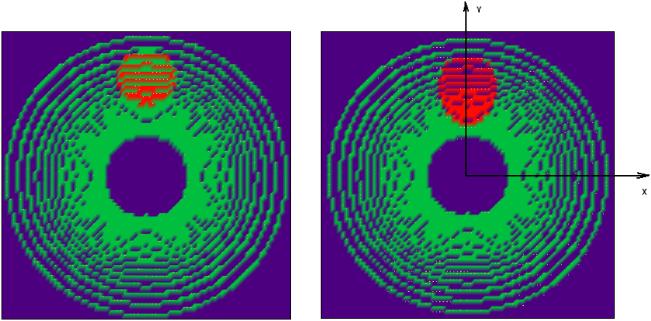
На рис. 8 изображены два
кадра, полученные радиометром АСПРФО 21.06.07. в 12 час. 20 мин. Фиолетовая
область нулевых значений в центре кадра –
”слепая” зона радиометра – область зенитных углов (от 30o до 0o),
в пределах которых сканирование радиометром не осуществляется. Сегмент нулевых
значений в правом нижнем углу кадра – область затенения опорной стойкой –
“мёртвая” зона. Слева кадр полученный
радиометром АСПРФО, справа этот же кадр, восстановленный с поправкой на
скорость. Расчётная скорость облачного поля в этот момент составила 0,137
ячейки/с, а угол отклонения вектора скорости α, согласно примечаниям для
таблицы 1, равен 165 градусам. Стрелкой на правом кадре обозначено направление
движения облачного поля.
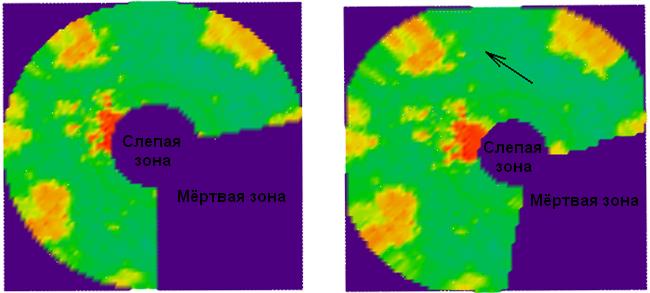
а б
Рис. 8. а - исходный кадр,
полученный радиометром АСПРФО, б – тот же кадр, восстановленный с поправкой на
скорость.
Из рис. 8 следует, что при
некоторых “удачных” направлениях движения облачного поля, зона обзора (рабочая
область) радиометра увеличивается. Это объясняется следующим образом. Элементы
кадра, находящиеся на краю рабочей области радиометра и соответствующие большим
зенитным углам, имеют минимальное искажение по скорости, поскольку они соответствуют
почти мгновенным измерениям радиометра, который начинает сканирование с внешнего
радиуса рабочей зоны. Эти элементы при восстановлении кадра практически не
сдвигаются и внешний радиус рабочей области кадра не меняется. По мере
приближения к центру кадра, его элементы всё больше сдвинуты относительно реального
положения и при восстановлении кадра с поправкой на скорость они существенно
сдвигаются относительно своего начального положения. Направление сдвига противоположно
направлению вектора скорости облачного поля. Таким образом, при восстановлении
кадра с учётом скорости, “слепая” зона радиометра (тёмная область в центре
кадра), будет смещаться в противоположную сторону от направления движения
облачного поля. Если движение облачного поля из “мертвой” зоны радиометра
(сегмент нулевых значений кадра), то при обработке кадра эта зона переместится
в сторону нерабочей области радиометра и тем самым увеличит информативные
размеры кадра. Напротив, если направление вектора скорости облачного поля в
сторону нерабочей зоны радиометра – восстановленный с поправкой на скорость
кадр получиться сжатым.
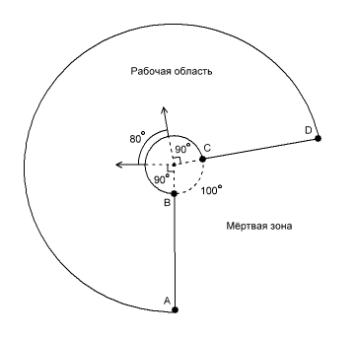
Рис. 9. Геометрический
расчёт смещения “слепой” зоны.
Из рис. 9 следует, что для сохранения
информативности кадра, необходимо обеспечить сохранение границ “мёртвой” зоны (AB и CD)
радиометра. Это возможно, когда малая окружность “слепой” зоны не перемещается
в интервале направлений, ограниченных стрелками. В противном случае - информативная
область кадра уменьшается. Таким образом, вероятность того что кадр при
восстановлении с поправкой на скорость окажется сжатым равна:
Ω = 80/360 = 22,2 %
Соответственно вероятность расширения рабочей
области кадра:
Ψ = 1- Ω = 77,8 %
Вероятности рассчитаны для
равновероятных направлений ветра в зоне работы радиометра. В противном случае,
следует ориентировать сканирующий радиометр так, чтобы преобладающее направление
ветра было со стороны его “мёртвой” зоны.
Предложенный способ
исключения погрешности сканирующих радиометров
позволяет за счёт восстановления кадра расширить его рабочую область,
тем самым, увеличивая информативность исследуемого облачного поля.
ЛИТЕРАТУРА
1.
Устройство
распознавания форм облачности: Патент на изобретение №2331853 Россия, G01J 3/06
/ М.И. Алленов, В.Н. Иванов, Н.Д. Третьяков. - Опубл. 20.08.2008, бюлл. №23.
2.
Сканирующий
полусферический радиометр. / М.И. Алленов, В.Н. Иванов, Д.Н. Третьяков, Н.Д.
Третьяков. // Приборы и техника эксперимента.
№5, 2009, с.162 – 163.
3.
Способ
определения направления и скорости движения нижней границы облачности. М.И.
Алленов, А.В. Артюхов, В.Н. Иванов, Н.Д. Третьяков. Заявка на изобретение
№2009119462/28(026823) от 22.05.2009. Решение РОСПАТЕНТА о выдаче патента на
изобретение от 27.10.2010.
ABOUT THE METHOD OF THE ACCOUNT OF ERRORS OF MOVING
CLOUDS UNDER HEMISPHERICAL IMAGES OF THE SCANNING RADIOMETER IN THE RANGE 8-13
MICRONS
Allenov M. I., Tretyakov N. D., Fiodorov
V. O., Jakimenko I. V.
In the given work some image aberrations of low-temperature scanning radio
meters are considered at registration of moving objects (cloudy fields) and
definition of a point of overcast. Quantitative estimations of possible errors
are resulted and ways of their elimination are offered.
Keywords: low-temperature
radiometer, own radiation, an error, a point, clouds, a direction, speed,
movement.
Военная академия войсковой
ПВО Вооруженных Сил Российской Федерации имени Маршала Советского Союза А.М.
Василевского (ВА ВПВО ВС РФ)
Государственное учреждение «Научно-производственное
объединение «ТАЙФУН»
Поступила в редакцию 30.03.2011